Plasticity with Isotropic Hardening#
![]()
Small-strain Plasticity
linear-elastic plastic material formulation with isotropic hardening
define a body force vector
extract state variables
The normal plastic strain due to a body force applied on a solid with a linear-elastic plastic material formulation with isotropic hardening with young’s modulus \(E=1\), poisson ratio \(\nu=0.3\), isotropic hardening modulus \(K=0.3\), yield stress \(\sigma_y=1\), length \(L=3\) and cross section area \(A=1\) is to be evaluated.

First, let’s create a meshed cube out of hexahedron cells with n=(16, 6, 6) points per axis. A three-dimensional vector-valued displacement field is initiated on the numeric region.
import numpy as np
import felupe as fem
mesh = fem.Cube(b=(3, 1, 1), n=(16, 6, 6))
region = fem.RegionHexahedron(mesh)
displacement = fem.Field(region, dim=3)
field = fem.FieldContainer([displacement])
A fixed boundary condition is applied at \(x=0\).
boundaries = {"fixed": fem.dof.Boundary(displacement, fx=0)}
The material behaviour is defined through a built-in isotropic linear-elastic plastic material formulation with isotropic hardening.
Linear-elastic-plastic material formulation with linear isotropic hardening (return mapping algorithm)
Given state in point x (σn, ζn=[εpn, αn]) (valid).
Given strain increment dε, so that ε = εn + dε.
Evaluation of the hypothetic trial state:
dσdε = λ 1 ⊗ 1 + 2μ 1 ⊙ 1
σ = σn + dσdε : dε
s = dev(σ)
εp = εpn
α = αn
f = ||s|| - sqrt(2/3) (σy + K α)
If f ≤ 0, then elastic step:
Set y = yn + dy, y=(σ, ζ=[εp, α]), algorithmic consistent tangent modulus dσdε.
Else:
dγ = f / (2μ + 2/3 K) n = s / ||s|| σ = σ - 2μ dγ n εp = εpn + dγ n α = αn + sqrt(2 / 3) dγ Algorithmic consistent tangent modulus: dσdε = dσdε - 2μ / (1 + K / 3μ) n ⊗ n - 2μ dγ / ||s|| ((2μ 1 ⊙ 1 - 1/3 1 ⊗ 1) - 2μ n ⊗ n)
umat = fem.LinearElasticPlasticIsotropicHardening(E=1, nu=0.3, sy=1, K=0.3)
solid = fem.SolidBody(umat, field)
The body force is created on the field of the solid body.
bodyforce = fem.SolidBodyGravity(field)
b = fem.math.linsteps([0, 0.5], num=10, axis=0, axes=3)
Inside a Newton-Rhapson procedure, the vectors and matrices are assembled for the given items and the boundary conditions are incorporated into the equilibrium equations.
step = fem.Step(items=[solid, bodyforce], ramp={bodyforce: b}, boundaries=boundaries)
job = fem.Job(steps=[step])
job.evaluate()
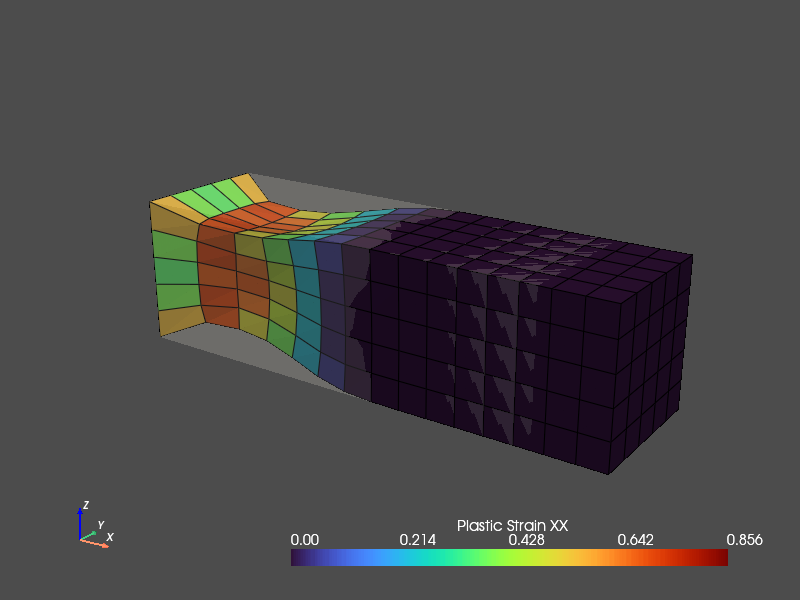
A view on the field-container shows the deformed mesh and the normal plastic strain in direction \(x\) due to the applied body force. The vector of all state variables, stored as a result in the solid body object, are splitted into separate variables. The plastic strain is stored as the second state variable. The mean-per-cell value of the plastic strain in direction \(x\) is exported to the view.
def screenshot(solid, field, filename):
"Visualize the final Normal Plastic Strain in direction X."
plastic_strain = np.split(solid.results.statevars, umat.statevars_offsets)[1]
view = fem.View(field, cell_data={"Plastic Strain": plastic_strain.mean(-2).T})
plotter = view.plot("Plastic Strain", component=0, off_screen=True)
plotter.show(screenshot=filename, window_size=(800, 600), jupyter_backend="panel")
screenshot(solid, field, filename="images/bodyforce-load.png")
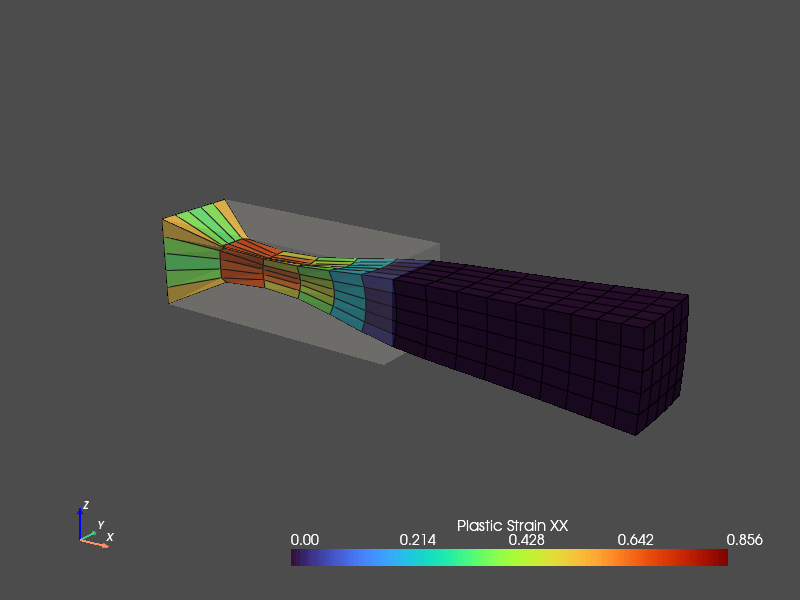
step = fem.Step(
items=[solid, bodyforce], ramp={bodyforce: b[::-1]}, boundaries=boundaries
)
job = fem.Job(steps=[step])
job.evaluate()
screenshot(solid, field, filename="images/bodyforce-unload.png")