Total- & Updated-Lagrange#
This page contains Total- and Updated-Lagrange material formulations with automatic differentiation using tensortrax.math. The material model formulations are defined by the first Piola-Kirchhoff stress tensor. Function-decorators are available to use Total-Lagrange and Updated-Lagrange material formulations in MaterialAD.
Differentiable Tensors based on NumPy Arrays.#
Frameworks
|
A material definition with a given function for the partial derivative of the strain energy function w.r.t. |
|
Decorate a second Piola-Kirchhoff stress Total-Lagrange material formulation as a first Piola-Kirchoff stress function. |
|
Decorate a Cauchy-stress Updated-Lagrange material formulation as a first Piola- Kirchoff stress function. |
Material Models for MaterialAD
|
Second Piola-Kirchhoff stress tensor of the MORPH model formulation [1]_. |
|
First Piola-Kirchhoff stress tensor of the MORPH model formulation [1]_, implemented by the concept of representative directions [2], [3]. |
Detailed API Reference
- class felupe.MaterialAD(fun, nstatevars=0, parallel=False, **kwargs)[source]#
A material definition with a given function for the partial derivative of the strain energy function w.r.t. the deformation gradient tensor with Automatic Differentiation provided by tensortrax.
- Parameters:
fun (callable) – A gradient of the strain energy density function w.r.t. the deformation gradient tensor \(\boldsymbol{F}\). Function signature must be
fun = lambda F, **kwargs: Pfor functions without state variables andfun = lambda F, statevars, **kwargs: [P, statevars_new]for functions with state variables. The deformation gradient tensor will be atensortrax.Tensorwhen the function is evaluated. It is important to only use differentiable math-functions fromtensortrax.math!nstatevars (int, optional) – Number of state variables (default is 0).
parallel (bool, optional) – A flag to invoke threaded gradient of strain energy density function evaluations (default is False). May introduce additional overhead for small-sized problems.
**kwargs (dict, optional) – Optional keyword-arguments for the gradient of the strain energy density function.
Notes
The gradient of the strain energy density function \(\frac{\partial \psi}{\partial \boldsymbol{F}}\) must be given in terms of the deformation gradient tensor \(\boldsymbol{F}\).
Warning
It is important to only use differentiable math-functions from
tensortrax.math!\[\boldsymbol{P} = \frac{\partial \psi(\boldsymbol{F}, \boldsymbol{\zeta})}{ \partial \boldsymbol{F}}\]Take this code-block as template
import tensortrax.math as tm def neo_hooke(F, mu): "First Piola-Kirchhoff stress of the Neo-Hookean material formulation." C = tm.dot(tm.transpose(F), F) Cu = tm.linalg.det(C) ** (-1/3) * C return mu * F @ tm.special.dev(Cu) @ tm.linalg.inv(C) umat = fem.MaterialAD(neo_hooke, mu=1)
and this code-block for material formulations with state variables:
import tensortrax.math as tm def viscoelastic(F, Cin, mu, eta, dtime): "Finite strain viscoelastic material formulation." # unimodular part of the right Cauchy-Green deformation tensor C = tm.dot(tm.transpose(F), F) Cu = tm.linalg.det(C) ** (-1 / 3) * C # update of state variables by evolution equation Ci = tm.special.from_triu_1d(Cin, like=C) + mu / eta * dtime * Cu Ci = tm.linalg.det(Ci) ** (-1 / 3) * Ci # second Piola-Kirchhoff stress tensor S = mu * tm.special.dev(Cu @ tm.linalg.inv(Ci)) @ tm.linalg.inv(C) # first Piola-Kirchhoff stress tensor and state variable return F @ S, tm.special.triu_1d(Ci) umat = fem.MaterialAD( viscoelastic, mu=1, eta=1, dtime=1, nstatevars=6 )
Note
See the documentation of tensortrax for further details.
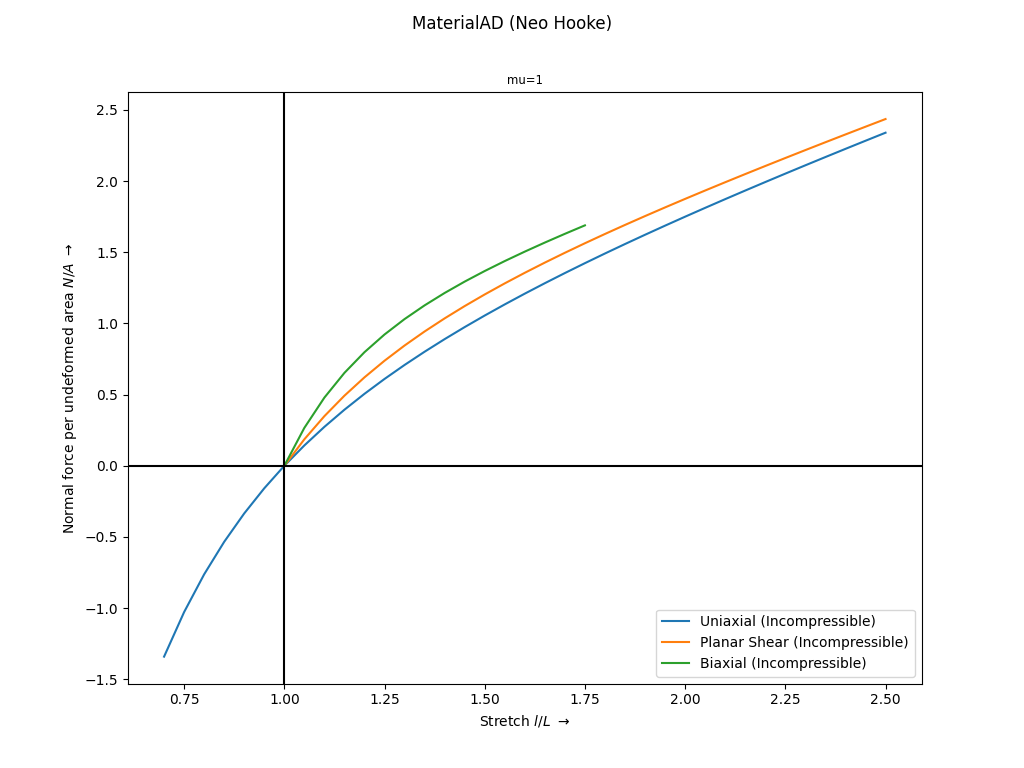
Examples
>>> import felupe as fem >>> import tensortrax.math as tm >>> >>> def neo_hooke(F, mu): ... C = tm.dot(tm.transpose(F), F) ... S = mu * tm.special.dev(tm.linalg.det(C)**(-1/3) * C) @ tm.linalg.inv(C) ... return F @ S >>> >>> umat = fem.MaterialAD(neo_hooke, mu=1) >>> ax = umat.plot(incompressible=True)
- copy()#
Return a deep-copy of the constitutive material.
- gradient(x)#
Return the evaluated gradient of the strain energy density function.
- Parameters:
x (list of ndarray) – The list with input arguments. These contain the extracted fields of a
FieldContaineralong with the old vector of state variables,[*field.extract(), statevars_old].- Returns:
A list with the evaluated gradient(s) of the strain energy density function and the updated vector of state variables.
- Return type:
list of ndarray
- hessian(x)#
Return the evaluated upper-triangle components of the hessian(s) of the strain energy density function.
- Parameters:
x (list of ndarray) – The list with input arguments. These contain the extracted fields of a
FieldContaineralong with the old vector of state variables,[*field.extract(), statevars_old].- Returns:
A list with the evaluated upper-triangle components of the hessian(s) of the strain energy density function.
- Return type:
list of ndarray
- optimize(ux=None, ps=None, bx=None, incompressible=False, relative=False, **kwargs)#
Optimize the material parameters by a least-squares fit on experimental stretch-stress data.
- Parameters:
ux (array of shape (2, ...) or None, optional) – Experimental uniaxial stretch and force-per-undeformed-area data (default is None).
ps (array of shape (2, ...) or None, optional) – Experimental planar-shear stretch and force-per-undeformed-area data (default is None).
bx (array of shape (2, ...) or None, optional) – Experimental biaxial stretch and force-per-undeformed-area data (default is None).
incompressible (bool, optional) – A flag to enforce incompressible deformations (default is False).
relative (bool, optional) – A flag to optimize relative instead of absolute residuals, i.e.
(predicted - observed) / observedinstead ofpredicted - observed(default is False).**kwargs (dict, optional) – Optional keyword arguments are passed to
scipy.optimize.least_squares().
- Returns:
ConstitutiveMaterial – A copy of the constitutive material with the optimized material parameters.
scipy.optimize.OptimizeResult – Represents the optimization result.
Notes
Warning
At least one load case, i.e. one of the arguments
ux,psorbxmust not beNone.The vector of residuals is given in Eq. (3) in case of absolute residuals
(1)#\[ \begin{align}\begin{aligned}\begin{split}\boldsymbol{r} &= \begin{bmatrix} \boldsymbol{r}_\text{ux} \\ \boldsymbol{r}_\text{ps} \\ \boldsymbol{r}_\text{bx} \end{bmatrix}\end{split}\\r_\text{ux}(\lambda_i) &= P_\text{ux}(\lambda_i) - P_\text{ux, observed}(\lambda_i)\\r_\text{ps}(\lambda_i) &= P_\text{ps}(\lambda_i) - P_\text{ps, observed}(\lambda_i)\\r_\text{bx}(\lambda_i) &= P_\text{bx}(\lambda_i) - P_\text{bx, observed}(\lambda_i)\end{aligned}\end{align} \]and in Eq. (4) in case of relative residuals.
(2)#\[ \begin{align}\begin{aligned}\begin{split}\boldsymbol{r} &= \begin{bmatrix} \boldsymbol{r}_\text{ux} \\ \boldsymbol{r}_\text{ps} \\ \boldsymbol{r}_\text{bx} \end{bmatrix}\end{split}\\r_\text{ux}(\lambda_i) &= \frac{ P_\text{ux}(\lambda_i) - P_\text{ux, observed}(\lambda_i)}{ P_\text{ux, observed}(\lambda_i) }\\r_\text{ps}(\lambda_i) &= \frac{ P_\text{ps}(\lambda_i) - P_\text{ps, observed}(\lambda_i)}{ P_\text{ps, observed}(\lambda_i) }\\r_\text{bx}(\lambda_i) &= \frac{ P_\text{bx}(\lambda_i) - P_\text{bx, observed}(\lambda_i)}{ P_\text{bx, observed}(\lambda_i) }\end{aligned}\end{align} \]Examples
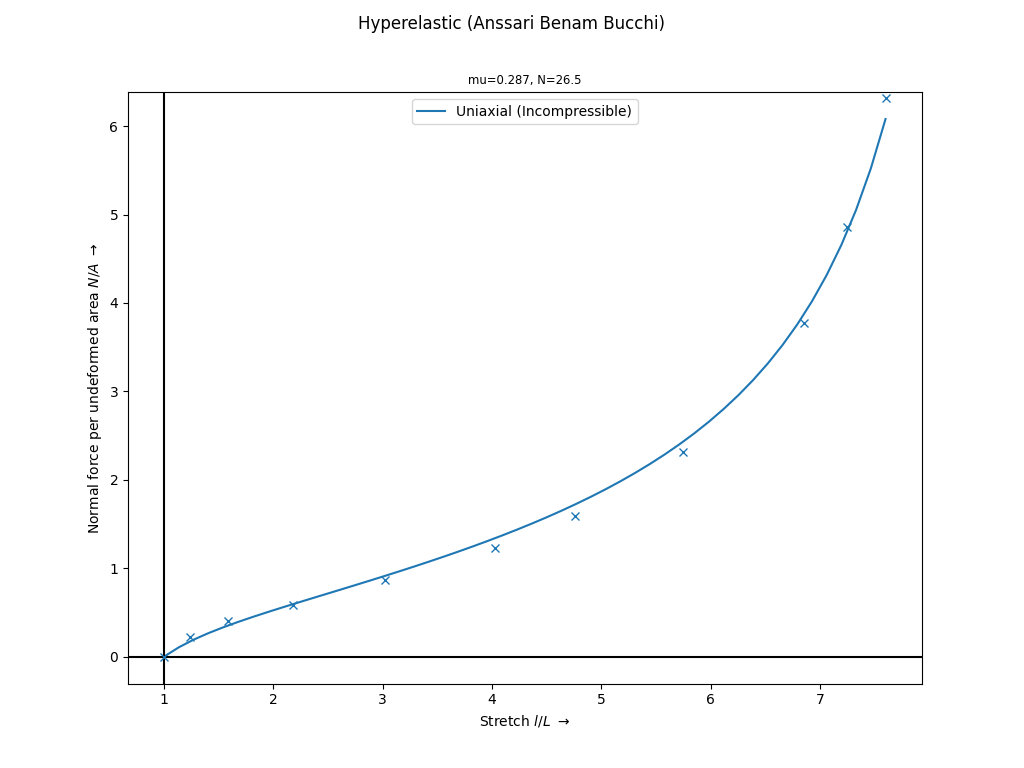
The
Anssari-Benam Bucchimaterial model formulation is best-fitted on Treloar’s uniaxial and biaxial tension data [1]_.>>> import numpy as np >>> import felupe as fem >>> >>> λ, P = np.array( ... [ ... [1.000, 0.00], ... [1.240, 2.30], ... [1.585, 4.16], ... [2.180, 6.00], ... [3.020, 8.80], ... [4.030, 12.5], ... [4.760, 16.2], ... [5.750, 23.6], ... [6.850, 38.5], ... [7.250, 49.6], ... [7.600, 64.4], ... ] ... ).T * np.array([[1.0], [0.0980665]]) >>> >>> umat = fem.Hyperelastic(fem.anssari_benam_bucchi) >>> umat_new, res = umat.optimize( ... ux=[λ, P], incompressible=True, relative=True ... ) >>> >>> ux = np.linspace(λ.min(), λ.max(), num=50) >>> ax = umat_new.plot(incompressible=True, ux=ux, bx=None, ps=None)
>>> ax.plot(λ, P, "C0x")
See also
scipy.optimize.least_squaresSolve a nonlinear least-squares problem with bounds on the variables.
References
- plot(incompressible=False, **kwargs)#
Return a plot with normal force per undeformed area vs. stretch curves for the elementary homogeneous deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
- Parameters:
incompressible (bool, optional) – A flag to enforce views on incompressible deformations (default is False).
**kwargs (dict, optional) – Optional keyword-arguments for
ViewMaterialorViewMaterialIncompressible.
- Return type:
See also
felupe.ViewMaterialCreate views on normal force per undeformed area vs. stretch curves for the elementary homogeneous deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
felupe.ViewMaterialIncompressibleCreate views on normal force per undeformed area vs. stretch curves for the elementary homogeneous incompressible deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
- screenshot(filename='umat.png', incompressible=False, **kwargs)#
Save a screenshot with normal force per undeformed area vs. stretch curves for the elementary homogeneous deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
- Parameters:
filename (str, optional) – The filename of the screenshot (default is “umat.png”).
incompressible (bool, optional) – A flag to enforce views on incompressible deformations (default is False).
**kwargs (dict, optional) – Optional keyword-arguments for
ViewMaterialorViewMaterialIncompressible.
- Return type:
See also
felupe.ViewMaterialCreate views on normal force per undeformed area vs. stretch curves for the elementary homogeneous deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
felupe.ViewMaterialIncompressibleCreate views on normal force per undeformed area vs. stretch curves for the elementary homogeneous incompressible deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
- view(incompressible=False, **kwargs)#
Create views on normal force per undeformed area vs. stretch curves for the elementary homogeneous deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
- Parameters:
incompressible (bool, optional) – A flag to enforce views on incompressible deformations (default is False).
**kwargs (dict, optional) – Optional keyword-arguments for
ViewMaterialorViewMaterialIncompressible.
- Return type:
See also
felupe.ViewMaterialCreate views on normal force per undeformed area vs. stretch curves for the elementary homogeneous deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
felupe.ViewMaterialIncompressibleCreate views on normal force per undeformed area vs. stretch curves for the elementary homogeneous incompressible deformations uniaxial tension/compression, planar shear and biaxial tension of a given isotropic material formulation.
- felupe.morph(F, statevars, p)[source]#
Second Piola-Kirchhoff stress tensor of the MORPH model formulation [1]_.
- Parameters:
C (tensortrax.Tensor) – Right Cauchy-Green deformation tensor.
statevars (array) – Vector of stacked state variables (CTS, C, SA).
p (list of float) – A list which contains the 8 material parameters.
Notes
The MORPH material model is implemented as a second Piola-Kirchhoff stress-based formulation with automatic differentiation. The Tresca invariant of the distortional part of the right Cauchy-Green deformation tensor is used as internal state variable, see Eq. (3).
Warning
While the MORPH-material formulation captures the Mullins effect and quasi-static hysteresis effects of rubber mixtures very nicely, it has been observed to be unstable for medium- to highly-distorted states of deformation.
(3)#\[ \begin{align}\begin{aligned}\boldsymbol{C} &= \boldsymbol{F}^T \boldsymbol{F}\\I_3 &= \det (\boldsymbol{C})\\\hat{\boldsymbol{C}} &= I_3^{-1/3} \boldsymbol{C}\\\hat{\lambda}^2_\alpha &= \text{eigvals}(\hat{\boldsymbol{C}})\\\hat{C}_T &= \max \left( \hat{\lambda}^2_\alpha - \hat{\lambda}^2_\beta \right)\\\hat{C}_T^S &= \max \left( \hat{C}_T, \hat{C}_{T,n}^S \right)\end{aligned}\end{align} \]A sigmoid-function is used inside the deformation-dependent variables \(\alpha\), \(\beta\) and \(\gamma\), see Eq. (4).
(4)#\[ \begin{align}\begin{aligned}f(x) &= \frac{1}{\sqrt{1 + x^2}}\\\alpha &= p_1 + p_2 \ f(p_3\ C_T^S)\\\beta &= p_4\ f(p_3\ C_T^S)\\\gamma &= p_5\ C_T^S\ \left( 1 - f\left(\frac{C_T^S}{p_6}\right) \right)\end{aligned}\end{align} \]The rate of deformation is described by the Lagrangian tensor and its Tresca- invariant, see Eq. (5).
Note
It is important to evaluate the incremental right Cauchy-Green tensor by the difference of the final and the previous state of deformation, not by its variation with respect to the deformation gradient tensor.
(5)#\[ \begin{align}\begin{aligned}\hat{\boldsymbol{L}} &= \text{sym}\left( \text{dev}(\boldsymbol{C}^{-1} \Delta\boldsymbol{C}) \right) \hat{\boldsymbol{C}}\\\lambda_{\hat{\boldsymbol{L}}, \alpha} &= \text{eigvals}(\hat{\boldsymbol{L}})\\\hat{L}_T &= \max \left( \lambda_{\hat{\boldsymbol{L}}, \alpha}-\lambda_{\hat{\boldsymbol{L}}, \beta} \right)\\\Delta\boldsymbol{C} &= \boldsymbol{C} - \boldsymbol{C}_n\end{aligned}\end{align} \]The additional stresses evolve between the limiting stresses, see Eq. (6). The additional deviatoric-enforcement terms [1]_ are neglected in this implementation.
(6)#\[ \begin{align}\begin{aligned}\boldsymbol{S}_L &= \left( \gamma \exp \left(p_7 \frac{\hat{\boldsymbol{L}}}{\hat{L}_T} \frac{\hat{C}_T}{\hat{C}_T^S} \right) + p8 \frac{\hat{\boldsymbol{L}}}{\hat{L}_T} \right) \boldsymbol{C}^{-1}\\\boldsymbol{S}_A &= \frac{ \boldsymbol{S}_{A,n} + \beta\ \hat{L}_T\ \boldsymbol{S}_L }{1 + \beta\ \hat{L}_T}\\\boldsymbol{S} &= 2 \alpha\ \text{dev}( \hat{\boldsymbol{C}} ) \boldsymbol{C}^{-1}+\text{dev}\left(\boldsymbol{S}_A\ \boldsymbol{C}\right) \boldsymbol{C}^{-1}\end{aligned}\end{align} \]Note
Only the upper-triangle entries of the symmetric stress-tensor state variables are stored in the solid body. Hence, it is necessary to extract such variables with
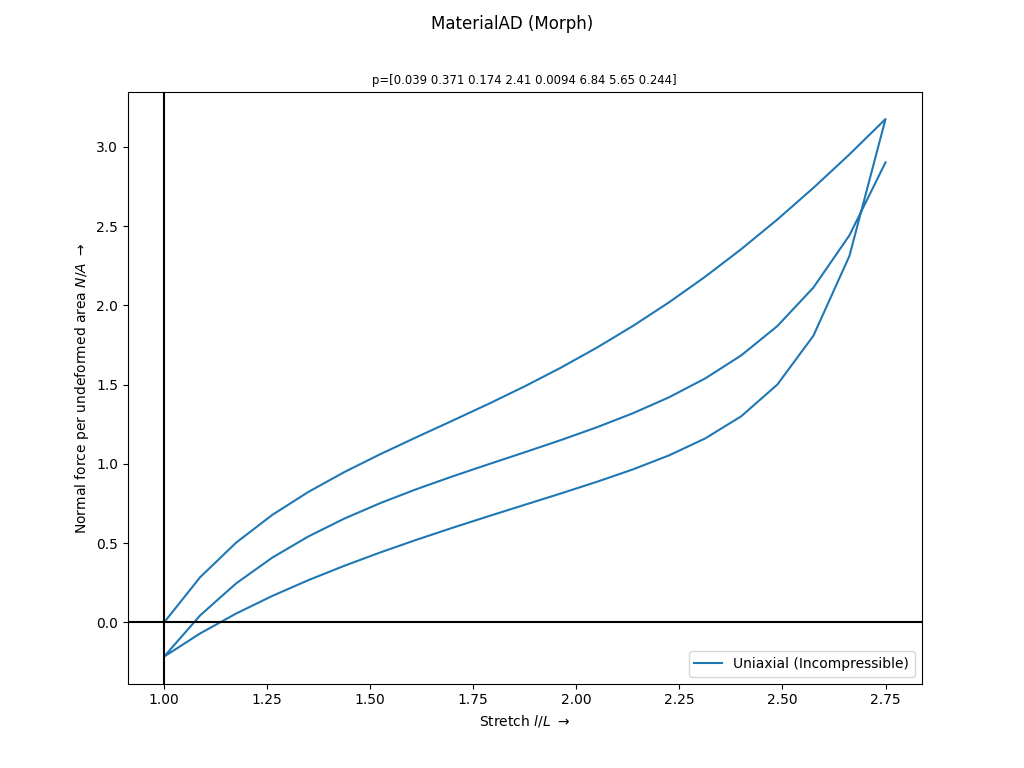
tm.special.from_triu_1d()and export them astm.special.triu_1d().Examples
>>> import felupe as fem >>> >>> umat = fem.MaterialAD( ... fem.morph, ... p=[0.039, 0.371, 0.174, 2.41, 0.0094, 6.84, 5.65, 0.244], ... nstatevars=13, ... ) >>> ax = umat.plot( ... incompressible=True, ... ux=fem.math.linsteps( ... # [1, 2, 1, 2.75, 1, 3.5, 1, 4.2, 1, 4.8, 1, 4.8, 1], ... [1, 2.75, 1, 2.75], ... num=20, ... ), ... ps=None, ... bx=None, ... )
References
See also
felupe.morph_representative_directionsStrain energy function of the MORPH model formulation, implemented by the concept of representative directions.
- felupe.morph_representative_directions(F, statevars, p, ε=1e-08)[source]#
First Piola-Kirchhoff stress tensor of the MORPH model formulation [1]_, implemented by the concept of representative directions [2], [3].
- Parameters:
C (tensortrax.Tensor) – Right Cauchy-Green deformation tensor.
statevars (array) – Vector of stacked state variables (CTS, λ - 1, SA1, SA2).
p (list of float) – A list which contains the 8 material parameters.
ε (float, optional) – A small stabilization parameter (default is 1e-8).
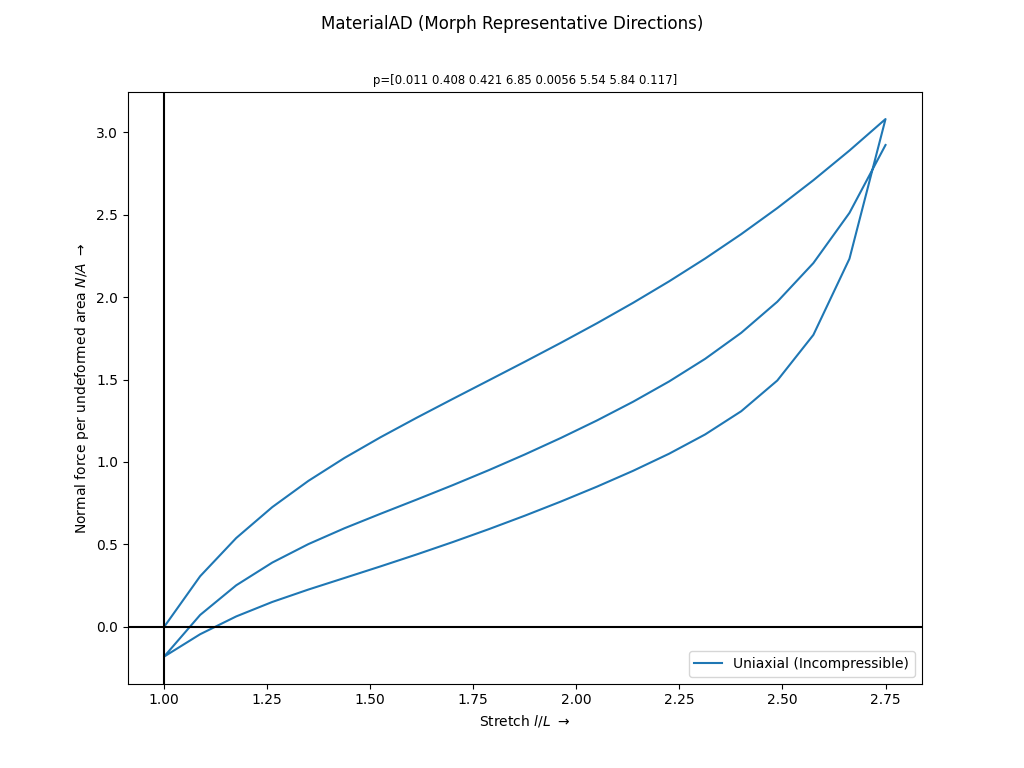
Examples
>>> import felupe as fem >>> >>> umat = fem.MaterialAD( ... fem.morph_representative_directions, ... p=[0.011, 0.408, 0.421, 6.85, 0.0056, 5.54, 5.84, 0.117], ... nstatevars=84, ... ) >>> ax = umat.plot( ... incompressible=True, ... ux=fem.math.linsteps( ... # [1, 2, 1, 2.75, 1, 3.5, 1, 4.2, 1, 4.8, 1, 4.8, 1], ... [1, 2.75, 1, 2.75], ... num=20, ... ), ... ps=None, ... bx=None, ... )
References
See also
felupe.morphStrain energy function of the MORPH model formulation.
- felupe.total_lagrange(material)[source]#
Decorate a second Piola-Kirchhoff stress Total-Lagrange material formulation as a first Piola-Kirchoff stress function.
Notes
\[\delta \psi = \boldsymbol{F} \boldsymbol{S} : \delta \boldsymbol{F}\]Examples
>>> import felupe as fem >>> import tensortrax.math as tm >>> >>> @fem.total_lagrange >>> def neo_hooke_total_lagrange(F, mu=1): >>> C = F.T @ F >>> S = mu * tm.special.dev(tm.linalg.det(C)**(-1/3) * C) @ tm.linalg.inv(C) >>> return S >>> >>> umat = fem.MaterialAD(neo_hooke_total_lagrange, mu=1)
See also
felupe.HyperelasticA hyperelastic material definition with a given function for the strain energy density function per unit undeformed volume with Automatic Differentiation.
felupe.MaterialADA material definition with a given function for the partial derivative of the strain energy function w.r.t. the deformation gradient tensor with Automatic Differentiation.
- felupe.updated_lagrange(material)[source]#
Decorate a Cauchy-stress Updated-Lagrange material formulation as a first Piola- Kirchoff stress function.
Notes
\[\delta \psi = J \boldsymbol{\sigma} \boldsymbol{F}^{-T} : \delta \boldsymbol{F}\]Examples
>>> import felupe as fem >>> import tensortrax.math as tm >>> >>> @fem.updated_lagrange >>> def neo_hooke_updated_lagrange(F, mu=1): >>> J = tm.linalg.det(F) >>> b = F @ F.T >>> σ = mu * tm.special.dev(J**(-2/3) * b) / J >>> return σ >>> >>> umat = fem.MaterialAD(neo_hooke_updated_lagrange, mu=1)
See also
felupe.HyperelasticA hyperelastic material definition with a given function for the strain energy density function per unit undeformed volume with Automatic Differentiation.
felupe.MaterialADA material definition with a given function for the partial derivative of the strain energy function w.r.t. the deformation gradient tensor with Automatic Differentiation.