Note
Go to the end to download the full example code.
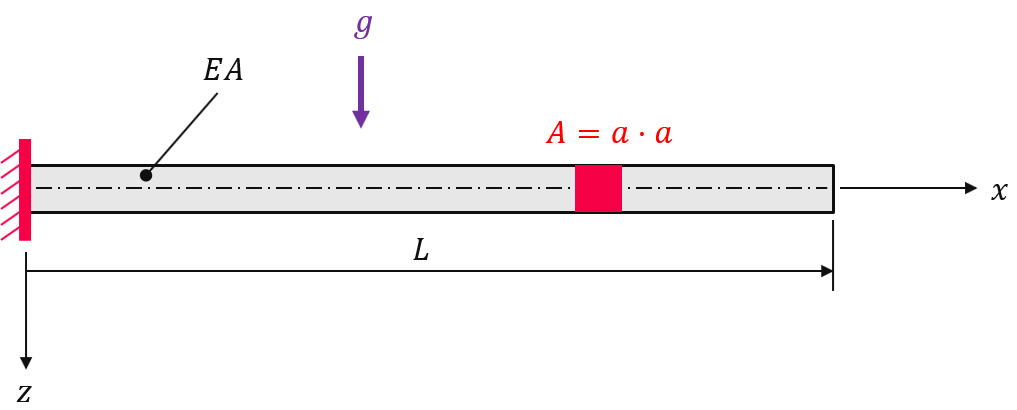
Cantilever beam under gravity#
The displacement due to gravity of a cantilever beam with young’s modulus \(E=206000\) MPa, poisson ratio \(\nu=0.3\), length \(L=2000\) mm and cross section area \(A=a \cdot a\) with \(a=100\) mm is to be evaluated within a linear-elastic analysis [1].
First, let’s create a meshed cube out of hexahedron cells. A numeric region created on the mesh represents the cantilever beam. A three- dimensional vector-valued displacement field is initiated on the region.
import felupe as fem
cube = fem.Cube(a=(0, 0, 0), b=(2000, 100, 100), n=(101, 6, 6))
region = fem.RegionHexahedron(cube, uniform=True)
displacement = fem.Field(region, dim=3)
field = fem.FieldContainer([displacement])
A fixed boundary condition is applied on the left end of the beam.
boundaries = fem.BoundaryDict(fixed=fem.dof.Boundary(displacement, fx=0))
boundaries.plot().show()
The material behaviour is defined through a built-in isotropic linear-elastic material formulation.
umat = fem.LinearElastic(E=206000, nu=0.3)
solid = fem.SolidBody(umat=umat, field=field)
The body force is defined by a (constant) gravity field on a solid body.
Inside a Newton-Raphson procedure, the weak form of linear elasticity is assembled into the stiffness matrix and the applied gravity field is assembled into the body force vector.
step = fem.Step(items=[solid, force], boundaries=boundaries)
job = fem.Job(steps=[step]).evaluate()
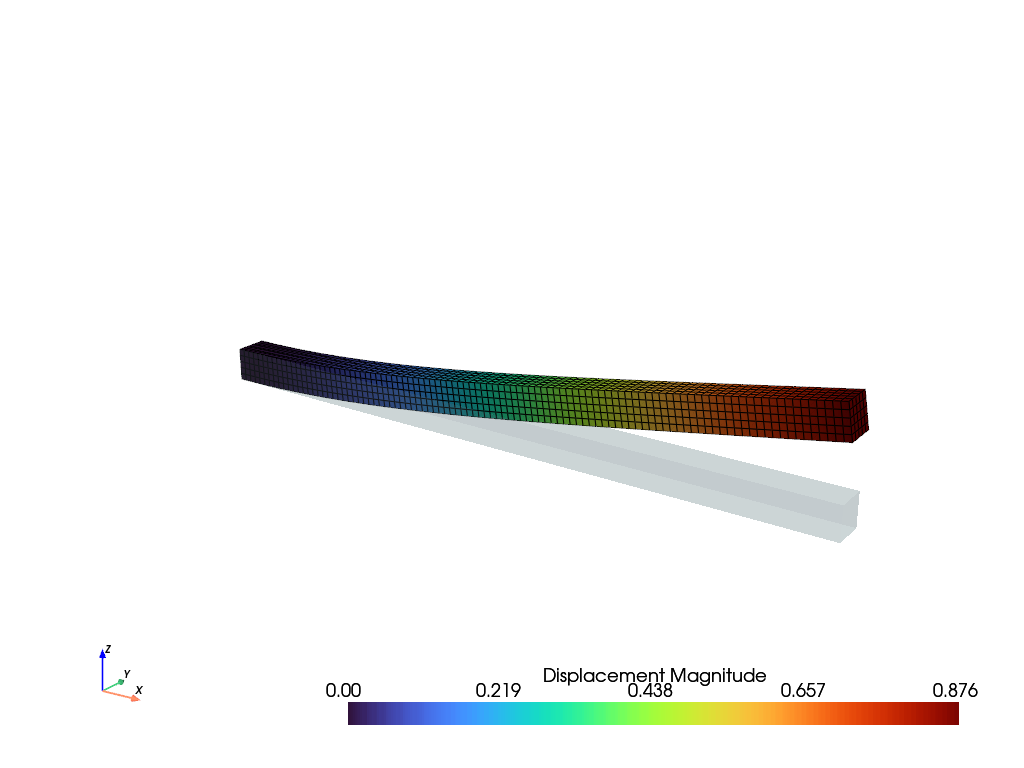
The magnitude of the displacement field are plotted on a 300x scaled deformed configuration.
field.plot("Displacement", component=None, factor=300).show()

References#
Total running time of the script: (0 minutes 3.556 seconds)