Note
Go to the end to download the full example code.
Numeric Continuation#
With the help of contique (install with
pip install contique) it is possible to apply a numerical parameter continuation
algorithm on any system of equilibrium equations. This example demonstrates the usage of
FElupe in conjunction with contique. An unstable isotropic hyperelastic material
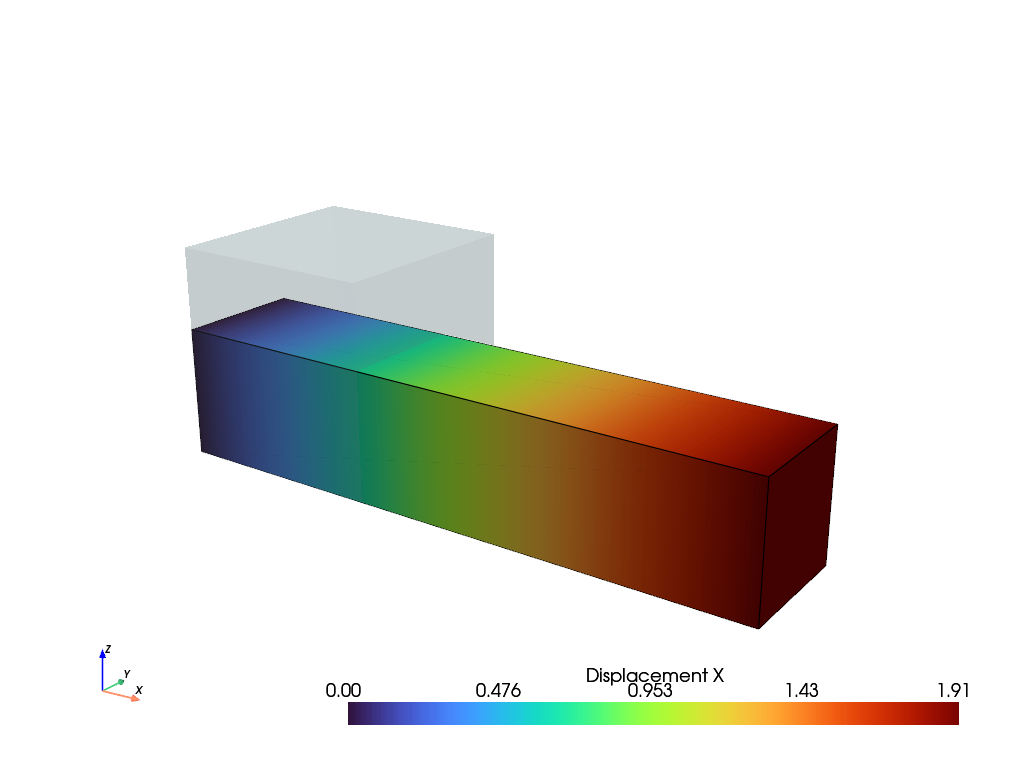
formulation is applied on a single hexahedron. The model will be visualized and the
resulting force - displacement curve will be plotted.
import contique
import matplotlib.pyplot as plt
import meshio
import numpy as np
import felupe as fem
import felupe.constitution.tensortrax as mat
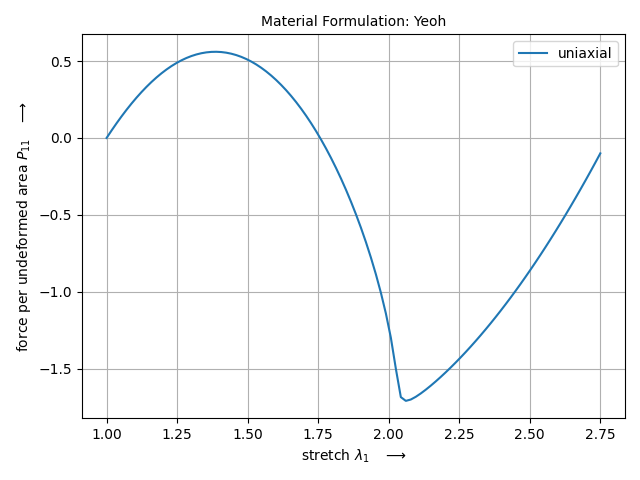
First, setup a problem as usual (mesh, region, field, boundaries and umat). The unstable material behavior is plotted for uniaxial incompressible tension.
# setup a numeric region on a cube
mesh = fem.Cube(n=2)
region = fem.RegionHexahedron(mesh)
field = fem.FieldContainer([fem.Field(region, dim=3)])
# introduce symmetry planes at x=y=z=0
boundaries = fem.dof.symmetry(field[0], axes=(True, True, True))
# partition degrees of freedom
dof0, dof1 = fem.dof.partition(field, boundaries)
# constitutive isotropic hyperelastic material formulation
yeoh = mat.Hyperelastic(mat.models.hyperelastic.yeoh, C10=0.5, C20=-0.25, C30=0.025)
ax = yeoh.plot(incompressible=True, ux=np.linspace(1, 2.76), bx=None, ps=None)
solid = fem.SolidBodyNearlyIncompressible(yeoh, field, bulk=5000)
An external normal force is applied at \(x=1\) on a quarter model of a cube with symmetry planes at \(x=y=z=0\). Therefore, we have to define an external load vector which will be scaled with the load-proportionality factor \(\lambda\) during numeric continuation.
# external force vector at x=1
right = region.mesh.points[:, 0] == 1
v = region.mesh.cells_per_point[right]
values_load = np.vstack([v, np.zeros_like(v), np.zeros_like(v)]).T
load = fem.PointLoad(field, right, values_load)
The next step involves the problem definition for contique. For details have a look at contique’s README.
def fun(x, lpf, *args):
"The system vector of equilibrium equations."
# re-create field-values from active degrees of freedom
field[0].values.ravel()[dof1] = x
load.update(values_load * lpf)
return fem.tools.fun(items=[solid, load], x=field)[dof1]
def dfundx(x, lpf, *args):
"""The jacobian of the system vector of equilibrium equations w.r.t. the
primary unknowns."""
field[0].values.ravel()[dof1] = x
load.update(values_load * lpf)
r = fem.tools.fun(items=[solid, load], x=field)
K = fem.tools.jac(items=[solid, load], x=field)
return fem.solve.partition(field, K, dof1, dof0, r)[2]
def dfundl(x, lpf, *args):
"""The jacobian of the system vector of equilibrium equations w.r.t. the
load proportionality factor."""
load.update(values_load)
return fem.tools.fun(items=[load], x=field)[dof1]
Next we have to init the problem and specify the initial values of unknowns (the undeformed configuration). After each completed step of the numeric continuation the XDMF-file will be updated.
# write xdmf file during numeric continuation
with meshio.xdmf.TimeSeriesWriter("result.xdmf") as writer:
writer.write_points_cells(mesh.points, [(mesh.cell_type, mesh.cells)])
def step_to_xdmf(step, res):
writer.write_data(step, point_data={"u": field[0].values})
# run contique (w/ rebalanced steps, 5% overshoot and a callback function)
Res = contique.solve(
fun=fun,
jac=[dfundx, dfundl],
x0=field[0][dof1],
lpf0=0,
dxmax=0.06,
dlpfmax=0.02,
maxsteps=35,
rebalance=True,
overshoot=1.05,
callback=step_to_xdmf,
tol=1e-2,
)
X = np.array([res.x for res in Res])
# check the final lpf value
assert np.isclose(X[-1, 1], -0.3982995)
|Step,C.| Control Component | Norm (Iter.#) | Message |
|-------|-------------------|---------------|-------------|
| 1,1 | 12+ => 12+ | 1.1e-03 ( 2#) | |
| 2,1 | 12+ => 12+ | 1.3e-03 ( 2#) | |
| 3,1 | 12+ => 12+ | 1.5e-03 ( 2#) | |
| 4,1 | 12+ => 12+ | 7.8e-03 ( 2#) | |
| 5,1 | 12+ => 12+ | 1.5e-04 ( 4#) | |
| 6,1 | 12+ => 5- | 5.4e+02 ( 8#) |Failed |
| 7,1 | 12+ => 12+ | 1.1e-01 ( 8#) |Failed |
| 8,1 | 12+ => 2+ | 3.2e-03 ( 2#) | => re-Cycle |
| 2 | 2+ => 2+ | 1.4e-03 ( 2#) | |
| 9,1 | 2+ => 9+ | 1.3e-03 ( 2#) |tol.Overshoot|
| 10,1 | 9+ => 2+ | 1.1e-03 ( 2#) |tol.Overshoot|
| 11,1 | 2+ => 5+ | 3.6e-03 ( 2#) |tol.Overshoot|
| 12,1 | 5+ => 9+ | 1.8e-08 ( 3#) |tol.Overshoot|
| 13,1 | 9+ => 2+ | 1.1e-07 ( 3#) |tol.Overshoot|
| 14,1 | 2+ => 12- | 6.1e-07 ( 3#) | => re-Cycle |
| 2 | 12- => 12- | 3.4e-03 ( 4#) | |
| 15,1 | 12- => 12- | 1.5e-04 ( 4#) | |
| 16,1 | 12- => 12- | 8.9e-06 ( 4#) | |
| 17,1 | 12- => 12- | 4.0e-06 ( 4#) | |
| 18,1 | 12- => 12- | 5.4e-03 ( 3#) | |
| 19,1 | 12- => 12- | 8.5e-03 ( 4#) | |
| 20,1 | 12- => 12- | 1.0e+02 ( 8#) |Failed |
| 21,1 | 12- => 5- | 8.5e+07 ( 8#) |Failed |
| 22,1 | 12- => 2+ | 6.3e-01 ( 8#) |Failed |
| 23,1 | 12- => 12- | 8.3e-03 ( 3#) | |
| 24,1 | 12- => 12- | 1.4e+01 ( 8#) |Failed |
| 25,1 | 12- => 0+ | 2.6e-03 ( 3#) | => re-Cycle |
| 2 | 0+ => 0+ | 6.0e-05 ( 2#) | |
| 26,1 | 0+ => 5+ | 5.7e-05 ( 2#) |tol.Overshoot|
| 27,1 | 5+ => 2+ | 5.5e-05 ( 2#) |tol.Overshoot|
| 28,1 | 2+ => 2+ | 1.9e-04 ( 2#) | |
| 29,1 | 2+ => 9+ | 6.3e-04 ( 2#) |tol.Overshoot|
| 30,1 | 9+ => 12+ | 2.1e-03 ( 2#) | => re-Cycle |
| 2 | 12+ => 12+ | 1.9e-05 ( 4#) | |
| 31,1 | 12+ => 12+ | 6.6e-04 ( 3#) | |
| 32,1 | 12+ => 12+ | 1.8e-04 ( 3#) | |
| 33,1 | 12+ => 12+ | 8.3e-05 ( 3#) | |
| 34,1 | 12+ => 12+ | 5.4e-05 ( 3#) | |
| 35,1 | 12+ => 12+ | 4.2e-05 ( 3#) | |
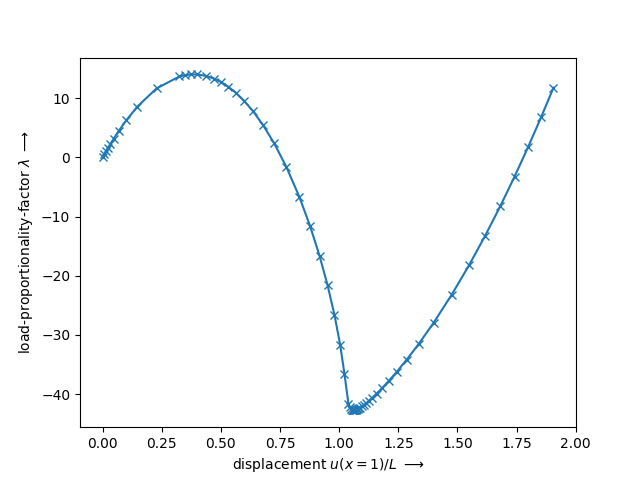
Finally, the force-displacement curve is plotted. It can be seen that the resulting (unstable) force-controlled equilibrium path is equal to the displacement-controlled load case.
plt.figure()
plt.plot(X[:, 0], X[:, -1], "x-")
plt.xlabel(r"displacement $u(x=1)/L$ $\longrightarrow$")
plt.ylabel(r"load-proportionality-factor $\lambda$ $\longrightarrow$")
field.plot("Displacement", component=0).show()
Total running time of the script: (0 minutes 2.279 seconds)