Mechanics#
Solid Bodies
|
A SolidBody with methods for the assembly of sparse vectors/matrices. |
|
A (nearly) incompressible solid body with methods for the assembly of sparse vectors/matrices. |
|
A body force on a solid body. |
|
A hydrostatic pressure boundary on a solid body. |
|
A Cauchy stress boundary on a solid body. |
|
A Truss body with methods for the assembly of sparse vectors/matrices. |
Steps and Jobs
|
A Step with multiple substeps, subsequently depending on the solution of the previous substep. |
|
A job with a list of steps and a method to evaluate them. |
|
A job with a list of steps and a method to evaluate them. |
|
A Free-Vibration Step/Job. |
Job Plugins
|
Base class for plugins. |
|
A job plugin to write an animation file during job evaluation. |
|
A job plugin to record a characteristic curve. |
|
A job plugin to output the progress of a job evaluation in the terminal. |
|
A job plugin to write XDMF files during job evaluation. |
|
A class to dispatch events to plugins during evaluation. |
|
A class to keep track of the context of a Job during evaluation. |
|
A class to keep track of the state of a Job during evaluation. |
|
A class to keep track of the state of an iteration during evaluation. |
Point Load and Multi-Point Constraints
|
A point load with methods for the assembly of sparse vectors/matrices, applied on the n-th field. |
|
A Multi-point-constraint which connects a center-point to a list of points. |
|
A frictionless point-to-rigid (wall) contact which connects a center-point to a list of points. |
Contact
|
A node-to-surface contact, where the surface is given by a rigid plane. |
Helpers for Custom Items and State Variables
A State with internal cell-wise constant dual fields for (nearly) incompressible solid bodies. |
|
|
A class with methods for assembling vectors and matrices of an Item. |
|
A class with evaluate methods of an Item. |
|
A class with intermediate results of an Item. |
|
A helper class to update an item in the parent class when the value changes. |
Detailed API Reference
- class felupe.SolidBody(umat, field, statevars=None, density=None, block=True, apply=None, multiplier=None)[source]#
Bases:
SolidA SolidBody with methods for the assembly of sparse vectors/matrices.
- Parameters:
umat (class) – A class which provides methods for evaluating the gradient and the hessian of the strain energy density function per unit undeformed volume. The function signatures must be
dψdF, ζ_new = umat.gradient([F, ζ])for the gradient andd2ψdFdF = umat.hessian([F, ζ])for the hessian of the strain energy density function \(\psi(\boldsymbol{F})\), where \(\boldsymbol{F}\) is the deformation gradient tensor and \(\zeta\) holds the array of internal state variables.field (FieldContainer) – A field container with one or more fields.
statevars (ndarray or None, optional) – Array of initial internal state variables (default is None).
density (float or None, optional) – The density of the solid body.
block (bool, optional) – Assemble a sparse matrix from sparse sub-blocks or assemble a sparse vector by stacking sparse matrices vertically (row wise). Default is True.
apply (callable or None, optional) – Apply a callable on the assembled vectors and sparse matrices. Default is None.
multiplier (float or None, optional) – A scale factor for the assembled vector and matrix. Default is None.
Notes
The total potential energy of internal forces is given in Eq. (1)
(1)#\[\Pi_{int}(\boldsymbol{F}) = \int_V \psi(\boldsymbol{F})\ dV\]with its variation, see Eq. (2)
(2)#\[\delta_\boldsymbol{u}(\Pi_{int}) = \int_V \frac{\partial \psi}{\partial \boldsymbol{F}} \ dV \longrightarrow \boldsymbol{f}_\boldsymbol{u}\]and linearization, see Eq. (3). The right-arrows in Eq. (2) and Eq. (3) represent the assembly into system scalars, vectors or matrices.
(3)#\[\delta_\boldsymbol{u}\Delta_\boldsymbol{u}(\Pi_{int}) = \int_V \delta\boldsymbol{F} : \frac{\partial^2 \psi}{ \partial \boldsymbol{F}\ \partial \boldsymbol{F} } : \Delta\boldsymbol{F}\ dV \longrightarrow \boldsymbol{K}_{\boldsymbol{u}\boldsymbol{u}}\]The displacement-based formulation leads to a linearized equation system as given in Eq. (4).
(4)#\[\boldsymbol{K}_{\boldsymbol{u}\boldsymbol{u}} \cdot \delta \boldsymbol{u} + \boldsymbol{f}_\boldsymbol{u} = \boldsymbol{0}\]Note
This class also supports
umatwith mixed-field formulations likeNearlyIncompressibleorThreeFieldVariation.Examples
>>> import felupe as fem >>> >>> mesh = fem.Cube(n=6) >>> region = fem.RegionHexahedron(mesh) >>> field = fem.FieldContainer([fem.Field(region, dim=3)]) >>> boundaries = fem.dof.uniaxial(field, clamped=True, return_loadcase=False) >>> >>> umat = fem.NeoHooke(mu=1, bulk=2) >>> solid = fem.SolidBody(umat, field) >>> >>> table = fem.math.linsteps([0, 1], num=5) >>> step = fem.Step( ... items=[solid], ... ramp={boundaries["move"]: table}, ... boundaries=boundaries, ... ) >>> >>> job = fem.Job(steps=[step]).evaluate() >>> solid.plot("Principal Values of Cauchy Stress").show()
See also
felupe.SolidBodyNearlyIncompressibleA (nearly) incompressible solid body with methods for the assembly of sparse vectors/matrices.
- checkpoint()[source]#
Return a checkpoint of the solid body.
- Returns:
A dict with checkpoint arrays / objects.
- Return type:
Examples
import felupe as fem mesh = fem.Rectangle(b=(3, 1), n=(7, 3)) region = fem.RegionQuad(mesh) field = fem.FieldContainer([fem.FieldPlaneStrain(region, dim=2)]) umat = fem.NeoHooke(mu=1, bulk=2) solid = fem.SolidBody(umat=umat, field=field) # 1. vertical compression boundaries = fem.dof.uniaxial( field, clamped=True, sym=False, axis=1, return_loadcase=False ) ramp = {boundaries["move"]: fem.math.linsteps([0, -0.2], num=2)} step = fem.Step(items=[solid], ramp=ramp, boundaries=boundaries) job = fem.Job(steps=[step]).evaluate() # checkpoint the current state of deformation checkpoint = solid.checkpoint() # 2a. horizontal shear (right) boundaries = fem.dof.shear( field, sym=False, moves=(0, 0, -0.2), return_loadcase=False ) ramp = {boundaries["move"]: fem.math.linsteps([0, 1], num=2)} step = fem.Step(items=[solid], ramp=ramp, boundaries=boundaries) job = fem.Job(steps=[step]).evaluate() # (1.) restore compression without shear solid.restore(checkpoint) # 2b. horizontal shear (left) boundaries = fem.dof.shear( field, sym=False, moves=(0, 0, -0.2), return_loadcase=False ) ramp = {boundaries["move"]: fem.math.linsteps([0, -1], num=2)} step = fem.Step(items=[solid], ramp=ramp, boundaries=boundaries) job = fem.Job(steps=[step]).evaluate()
See also
felupe.SolidBody.restoreRestore a checkpoint of a solid body inplace.
- restore(checkpoint, restore_statevars=True)[source]#
Restore a checkpoint inplace.
- Parameters:
See also
felupe.SolidBody.checkpointReturn a checkpoint of the solid body.
- revolve(n=11, phi=180)[source]#
Return a revolved solid body.
- Parameters:
- Returns:
The revolved solid body.
- Return type:
Examples
First, create an axisymmetric model. A non-homogeneous uniaxial tension load case is applied on the solid body.
>>> import felupe as fem >>> >>> region = fem.RegionQuad(mesh=fem.Rectangle(n=6)) >>> field = fem.FieldContainer([fem.FieldAxisymmetric(region, dim=2)]) >>> >>> umat = fem.NeoHookeCompressible(mu=1, lmbda=2) >>> solid = fem.SolidBody(umat=umat, field=field) >>> >>> boundaries = fem.dof.uniaxial( ... solid.field, clamped=True, sym=False, return_loadcase=False ... ) >>> step = fem.Step(items=[solid], boundaries=boundaries) >>> job = fem.Job(steps=[step]).evaluate() >>> >>> solid.plot("Principal Values of Cauchy Stress").show()
The solid body is now revolved around the x-axis. This model may now be used to apply non-axisymmetric loads. Here, the same load case is also applied on the 3d-model.
>>> new_solid = solid.revolve(n=11, phi=180) >>> boundaries = fem.dof.uniaxial( ... new_solid.field, clamped=True, sym=(0, 0, 1), return_loadcase=False ... ) >>> >>> step = fem.Step(items=[new_solid], boundaries=boundaries) >>> job = fem.Job(steps=[step]).evaluate() >>> >>> new_solid.plot("Principal Values of Cauchy Stress").show()
See also
SolidBodyNearlyIncompressible.revolveReturn a revolved solid body
- class felupe.SolidBodyNearlyIncompressible(umat, field, bulk, state=None, statevars=None, density=None)[source]#
Bases:
SolidA (nearly) incompressible solid body with methods for the assembly of sparse vectors/matrices. The constitutive material definition must provide the distortional part of the strain energy density function per unit undeformed volume only. The volumetric part of the strain energy density function is automatically added on additional internal (dual) cell-wise constant fields.
- Parameters:
umat (class) – A class which provides methods for evaluating the gradient and the hessian of the isochoric part of the strain energy density function per unit undeformed volume \(\hat\psi(\boldsymbol{F})\). The function signatures must be
dψdF, ζ_new = umat.gradient([F, ζ])for the gradient andd2ψdFdF = umat.hessian([F, ζ])for the hessian of the strain energy density function \(\hat{\psi}(\boldsymbol{F})\), where \(\boldsymbol{F}\) is the deformation gradient tensor and \(\zeta\) holds the array of internal state variables.field (FieldContainer) – A field container with one or more fields.
bulk (float) – The bulk modulus of the volumetric part of the strain energy function \(U(\bar{J})=K(\bar{J}-1)^2/2\).
state (StateNearlyIncompressible or None, optional) – A valid initial state for a (nearly) incompressible solid (default is None).
statevars (ndarray or None, optional) – Array of initial internal state variables (default is None).
density (float or None, optional) – The density of the solid body.
Notes
Note
This nearly-incompressible solid body works best with
RegionQuadandRegionHexahedronregions.RegionQuadraticTriangleandRegionQuadraticTetraregions are also supported.The total potential energy of internal forces for a three-field variational approach, suitable for nearly-incompressible material behaviour, is given in Eq. (5)
(5)#\[\Pi_{int}(\boldsymbol{F}, p, \bar{J}) = \int_V \hat{\psi}(\boldsymbol{F})\ dV + \int_V U(\bar{J})\ dV + \int_V p (J - \bar{J})\ dV\]with its variations, see Eq. (6)
(6)#\[ \begin{align}\begin{aligned}\delta_\boldsymbol{u}(\Pi_{int}) &= \int_V \left( \frac{\partial \hat{\psi}}{\partial \boldsymbol{F}} + p\ \frac{\partial J}{\partial \boldsymbol{F}} \right) : \delta\boldsymbol{F}\ dV \longrightarrow \boldsymbol{r}_\boldsymbol{u}\\\delta_p(\Pi_{int}) &= \int_V \left( J - \bar{J} \right)\ \delta p\ dV \longrightarrow r_p\\\delta_\bar{J}(\Pi_{int}) &= \int_V \left( K \left( \bar{J} - 1 \right) - p \right)\ \delta \bar{J}\ dV \longrightarrow r_{\bar{J}}\end{aligned}\end{align} \]and linearizations, see Eq. (7) [1] [2] [3]. The right-arrows in Eq. (6) and Eq. (7) represent the assembly into system scalars, vectors or matrices.
(7)#\[ \begin{align}\begin{aligned}\delta_\boldsymbol{u}\Delta_\boldsymbol{u}(\Pi_{int}) &= \int_V \delta\boldsymbol{F} : \left( \frac{\partial^2 \hat{\psi}}{ \partial \boldsymbol{F}\ \partial \boldsymbol{F} } + p \frac{\partial^2 J}{\partial \boldsymbol{F}\ \partial \boldsymbol{F}} \right) : \Delta\boldsymbol{F}\ dV \longrightarrow \boldsymbol{K}_{\boldsymbol{u}\boldsymbol{u}}\\\delta_\boldsymbol{u}\Delta_p(\Pi_{int}) &= \int_V \delta \boldsymbol{F} : \frac{\partial J}{\partial \boldsymbol{F}}\ \Delta p\ dV \longrightarrow \boldsymbol{K}_{\boldsymbol{u}p}\\\delta_p\Delta_{\bar{J}}(\Pi_{int}) &= \int_V \delta p\ (-1)\ \Delta \bar{J}\ dV \longrightarrow -V\\\delta_{\bar{J}}\Delta_{\bar{J}}(\Pi_{int}) &= \int_V \delta \bar{J}\ K\ \Delta \bar{J}\ dV \longrightarrow K\ V\end{aligned}\end{align} \]The assembled constraint equations for the variations w.r.t. the dual fields \(p\) and \(\bar{J}\) are given in Eq. (8).
(8)#\[ \begin{align}\begin{aligned}r_p &= \left( \frac{v}{V} - \bar{J} \right) V\\r_{\bar{J}} &= \left( K (\bar{J} - 1) - p \right) V\end{aligned}\end{align} \]The volumetric part of the strain energy density function is denoted in Eq. (9) along with its first and second derivatives.
(9)#\[ \begin{align}\begin{aligned}\bar{U} &= \frac{K}{2} \left( \bar{J} - 1 \right)^2\\\bar{U}' &= K \left( \bar{J} - 1 \right)\\\bar{U}'' &= K\end{aligned}\end{align} \]Hu-Washizu Three-Field-Variational Principle
The Three-Field-Variation \((\boldsymbol{u},p,\bar{J})\) leads to a linearized equation system with nine sub block-matrices, see Eq. (10) [4]. Due to the fact that the equation system is derived by a potential, the matrix is symmetric and hence, only six independent sub-matrices have to be evaluated. Furthermore, by the application of the mean dilatation technique, two of the remaining six sub-matrices are identified to be zero. That means four sub-matrices are left to be evaluated, where two non-zero sub-matrices are scalar-valued entries.
(10)#\[\begin{split}\begin{bmatrix} \boldsymbol{K}_{\boldsymbol{u}\boldsymbol{u}} & \boldsymbol{K}_{\boldsymbol{u}p} & \boldsymbol{0} \\ \boldsymbol{K}_{\boldsymbol{u}p}^T & 0 & -V \\ \boldsymbol{0}^T & -V & K\ V \end{bmatrix} \cdot \begin{bmatrix} \delta \boldsymbol{u} \\ \delta p \\ \delta \bar{J} \end{bmatrix} + \begin{bmatrix} \boldsymbol{r}_\boldsymbol{u} \\ r_p \\ r_\bar{J} \end{bmatrix} = \begin{bmatrix} \boldsymbol{0}\\ 0 \\ 0 \end{bmatrix}\end{split}\]A condensed representation of the equation system, only dependent on the primary unknowns \(\boldsymbol{u}\) is carried out. To do so, the second line is multiplied by the bulk modulus \(K\), see Eq. (11).
(11)#\[\begin{split}\begin{bmatrix} \boldsymbol{K}_{\boldsymbol{u}\boldsymbol{u}} & \boldsymbol{K}_{\boldsymbol{u}p} & \boldsymbol{0} \\ K \boldsymbol{K}_{\boldsymbol{u}p}^T & 0 & -K\ V \\ \boldsymbol{0}^T & -V & K\ V \end{bmatrix} \cdot \begin{bmatrix} \delta \boldsymbol{u} \\ \delta p \\ \delta \bar{J} \end{bmatrix} + \begin{bmatrix} \boldsymbol{r}_\boldsymbol{u} \\ K\ r_p \\ r_\bar{J} \end{bmatrix} = \begin{bmatrix} \boldsymbol{0}\\ 0 \\ 0 \end{bmatrix}\end{split}\]Lines two and three are contracted by summation as given in Eq. (12). This eliminates \(\bar{J}\) from the unknowns.
(12)#\[\begin{split}\begin{bmatrix} \boldsymbol{K}_{\boldsymbol{u}\boldsymbol{u}} & \boldsymbol{K}_{\boldsymbol{u}p} \\ K \boldsymbol{K}_{\boldsymbol{u}p}^T & -V \end{bmatrix} \cdot \begin{bmatrix} \delta \boldsymbol{u} \\ \delta p \end{bmatrix} + \begin{bmatrix} \boldsymbol{r}_\boldsymbol{u} \\ K\ r_p + r_\bar{J} \end{bmatrix} = \begin{bmatrix} \boldsymbol{0}\\ 0 \end{bmatrix}\end{split}\]Next, the second line is left-expanded by \(\frac{1}{V}~\boldsymbol{K}_{\boldsymbol{u}p}\) and both equations are summed up again, see (13).
(13)#\[\left( \boldsymbol{K}_{\boldsymbol{u}\boldsymbol{u}} + \frac{K}{V}~\boldsymbol{K}_{\boldsymbol{u}p} \otimes \boldsymbol{K}_{\boldsymbol{u}p} \right) \cdot \delta \boldsymbol{u} + \boldsymbol{r}_\boldsymbol{u} + \frac{K~r_p + r_\bar{J}}{V} \boldsymbol{K}_{\boldsymbol{u}p} = \boldsymbol{0}\]The secondary unknowns are evaluated after solving the primary unknowns, see Eq. (14).
(14)#\[ \begin{align}\begin{aligned}\delta \bar{J} &= \frac{1}{V} \delta \boldsymbol{u} \cdot \boldsymbol{K}_{\boldsymbol{u}p} + \frac{v}{V} - \bar{J}\\\delta p &= K \left(\bar{J} + \delta \bar{J} - 1 \right) - p\end{aligned}\end{align} \]The condensed constraint equation in Eq. (13) is given in Eq. (15)
(15)#\[\frac{K~r_p + r_{\bar{J}}}{V} = K \left( \frac{v}{V} - 1 \right) - p\]and the deformed volume is evaluated by Eq. (16).
(16)#\[v = \int_V J\ dV\]Examples
>>> import felupe as fem >>> >>> mesh = fem.Cube(n=6) >>> region = fem.RegionHexahedron(mesh) >>> field = fem.FieldContainer([fem.Field(region, dim=3)]) >>> boundaries = fem.dof.uniaxial(field, clamped=True, return_loadcase=False) >>> >>> umat = fem.NeoHooke(mu=1) >>> solid = fem.SolidBodyNearlyIncompressible(umat, field, bulk=5000) >>> >>> table = fem.math.linsteps([0, 1], num=5) >>> step = fem.Step( ... items=[solid], ... ramp={boundaries["move"]: table}, ... boundaries=boundaries, ... ) >>> >>> job = fem.Job(steps=[step]).evaluate() >>> solid.plot("Principal Values of Cauchy Stress").show()
References
See also
felupe.StateNearlyIncompressibleA State with internal cell-wise constant fields for (nearly) incompressible solid bodies.
- checkpoint()[source]#
Return a checkpoint of the nearly-incompressible solid body.
- Returns:
A dict with checkpoint arrays / objects.
- Return type:
Examples
import felupe as fem mesh = fem.Rectangle(b=(3, 1), n=(7, 3)) region = fem.RegionQuad(mesh) field = fem.FieldContainer([fem.FieldPlaneStrain(region, dim=2)]) umat = fem.NeoHooke(mu=1) solid = fem.SolidBodyNearlyIncompressible(umat=umat, field=field, bulk=5000) # 1. vertical compression boundaries = fem.dof.uniaxial( field, clamped=True, sym=False, axis=1, return_loadcase=False ) ramp = {boundaries["move"]: fem.math.linsteps([0, -0.2], num=2)} step = fem.Step(items=[solid], ramp=ramp, boundaries=boundaries) job = fem.Job(steps=[step]).evaluate() # checkpoint the current state of deformation checkpoint = solid.checkpoint() # 2a. horizontal shear (right) boundaries = fem.dof.shear( field, sym=False, moves=(0, 0, -0.2), return_loadcase=False ) ramp = {boundaries["move"]: fem.math.linsteps([0, 1], num=2)} step = fem.Step(items=[solid], ramp=ramp, boundaries=boundaries) job = fem.Job(steps=[step]).evaluate() # (1.) restore compression without shear solid.restore(checkpoint) # 2b. horizontal shear (left) boundaries = fem.dof.shear( field, sym=False, moves=(0, 0, -0.2), return_loadcase=False ) ramp = {boundaries["move"]: fem.math.linsteps([0, -1], num=2)} step = fem.Step(items=[solid], ramp=ramp, boundaries=boundaries) job = fem.Job(steps=[step]).evaluate()
See also
felupe.SolidBody.restoreRestore a checkpoint of a nearly-incompressible solid body inplace.
- restore(checkpoint, restore_statevars=True, restore_state=True)[source]#
Restore a checkpoint inplace.
- Parameters:
See also
felupe.SolidBodyNearlyIncompressible.checkpointReturn a checkpoint of the nearly-incompressible solid body.
- revolve(n=11, phi=180)[source]#
Return a revolved solid body.
- Parameters:
- Returns:
The revolved solid body.
- Return type:
See also
SolidBody.revolveReturn a revolved solid body
- class felupe.SolidBodyForce(field, values=None, scale=1.0)[source]#
Bases:
objectA body force on a solid body.
- Parameters:
field (FieldContainer) – A field container with fields created on a boundary region.
values (ndarray or None, optional) – The prescribed values (e.g. gravity \(\boldsymbol{g}\)). Default is None. If None, the values are set to zero (the dimension is derived from the first field of the field container).
scale (float, optional) – An optional scale factor for the values, e.g. density \(\rho\) of the solid body. Default is 1.0.
Notes
\[\delta W_{ext} = \int_V \delta \boldsymbol{u} \cdot \rho \boldsymbol{g} \ dV\]Examples
>>> import felupe as fem >>> >>> mesh = fem.Cube(n=6) >>> region = fem.RegionHexahedron(mesh) >>> field = fem.FieldContainer([fem.Field(region, dim=3)]) >>> boundaries = fem.dof.symmetry(field[0]) >>> >>> umat = fem.NeoHooke(mu=1, bulk=2) >>> solid = fem.SolidBody(umat, field) >>> density = 1.0 >>> force = fem.SolidBodyForce(field, scale=density) >>> >>> gravity = fem.math.linsteps([0, 2], num=5, axis=0, axes=3) >>> step = fem.Step( ... items=[solid, force], ... ramp={force: gravity}, ... boundaries=boundaries, ... ) >>> >>> job = fem.Job(steps=[step]).evaluate() >>> solid.plot("Principal Values of Cauchy Stress").show()
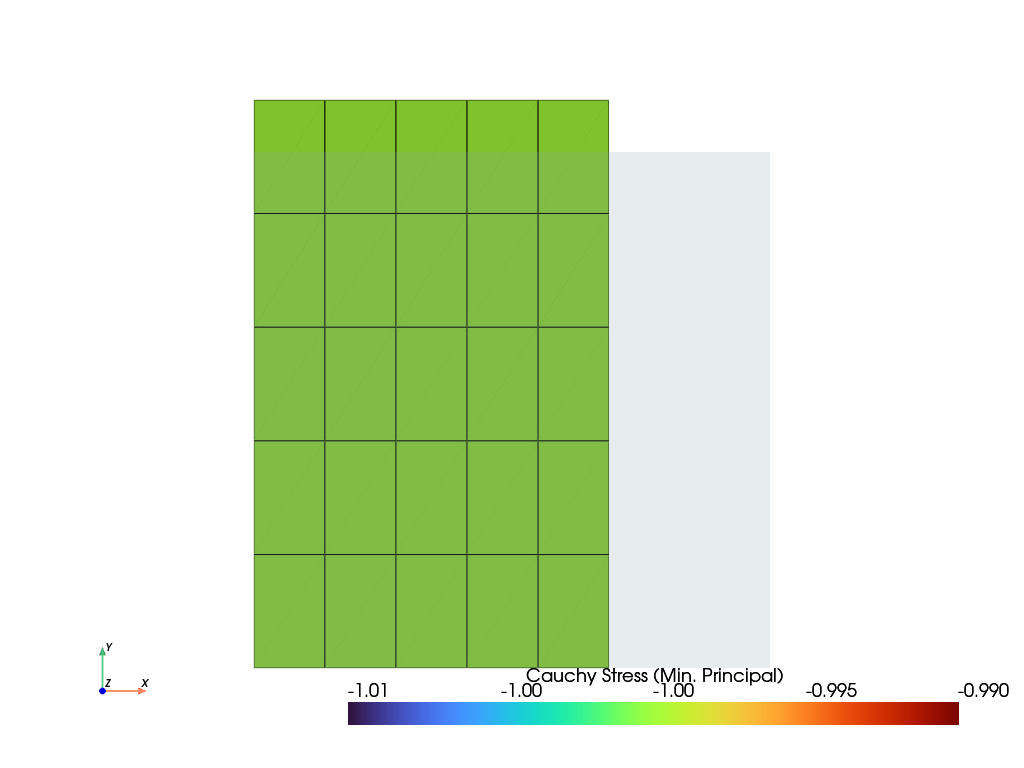
- class felupe.SolidBodyPressure(field, pressure=None)[source]#
Bases:
objectA hydrostatic pressure boundary on a solid body.
- Parameters:
field (FieldContainer) – A field container with fields created on a boundary region.
pressure (float or ndarray or None, optional) – A scaling factor for the prescribed pressure \(p\) (default is None). If None, the pressure is set to zero.
Notes
Hint
The pressure is always given as normal force per deformed area. This is important for axisymmetric problems.
\[\delta W_{ext} = \int_{\partial V} \delta \boldsymbol{u} \cdot (-p) J \boldsymbol{F}^{-T} \ d\boldsymbol{A}\]Examples
>>> import felupe as fem >>> >>> mesh = fem.Rectangle(n=6) >>> region = fem.RegionQuad(mesh) >>> field = fem.FieldContainer([fem.FieldAxisymmetric(region, dim=2)]) >>> boundaries = fem.dof.symmetry(field[0]) >>> umat = fem.NeoHooke(mu=1, bulk=2) >>> solid = fem.SolidBody(umat, field) >>> >>> region_pressure = fem.RegionQuadBoundary( ... mesh=mesh, ... only_surface=True, # select only faces on the outline ... mask=mesh.points[:, 0] == 1, # select a subset of faces on the surface ... ensure_3d=True, # requires True for axisymmetric/plane strain, otherwise False ... ) >>> field_boundary = fem.FieldContainer([fem.FieldAxisymmetric(region_pressure, dim=2)]) >>> pressure = fem.SolidBodyPressure(field=field_boundary) >>> >>> table = fem.math.linsteps([0, 1], num=5) >>> step = fem.Step( ... items=[solid, pressure], ramp={pressure: 1 * table}, boundaries=boundaries ... ) >>> >>> job = fem.Job(steps=[step]).evaluate() >>> solid.plot( ... "Principal Values of Cauchy Stress", component=2, clim=[-1.01, -0.99] ... ).show()
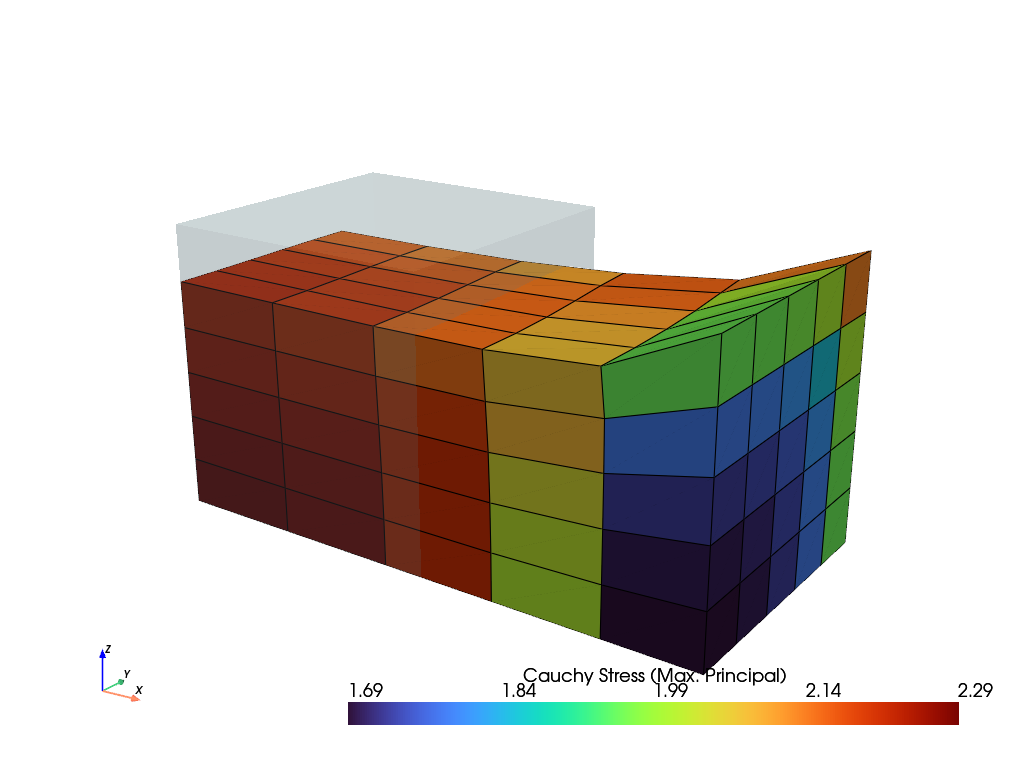
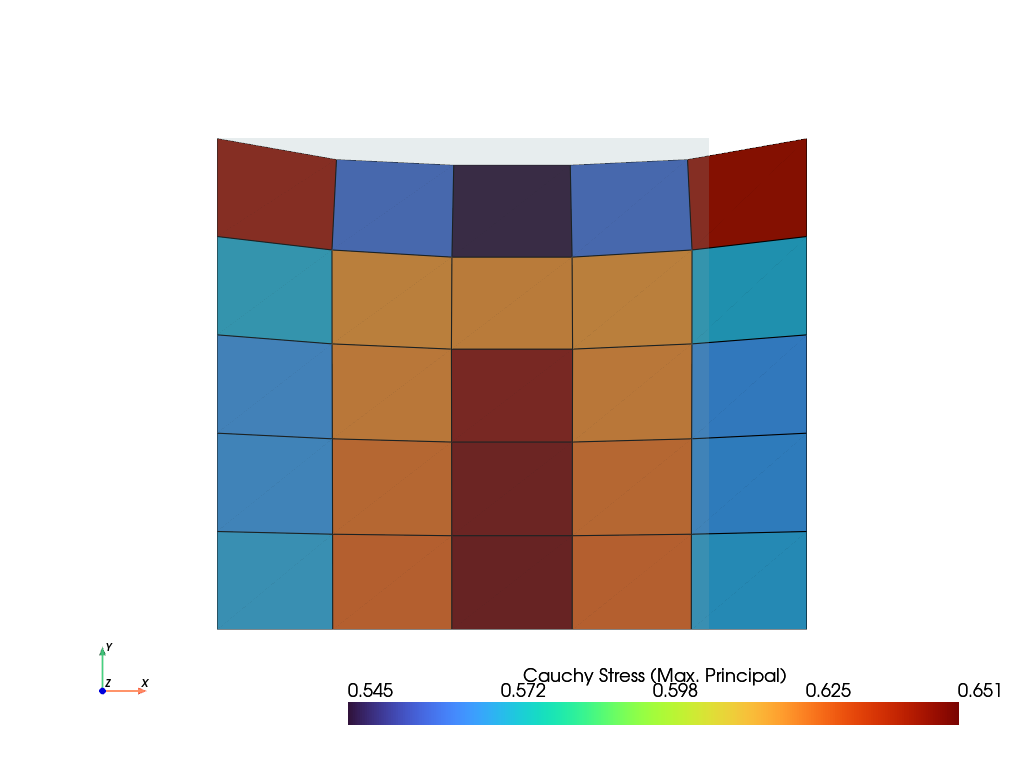
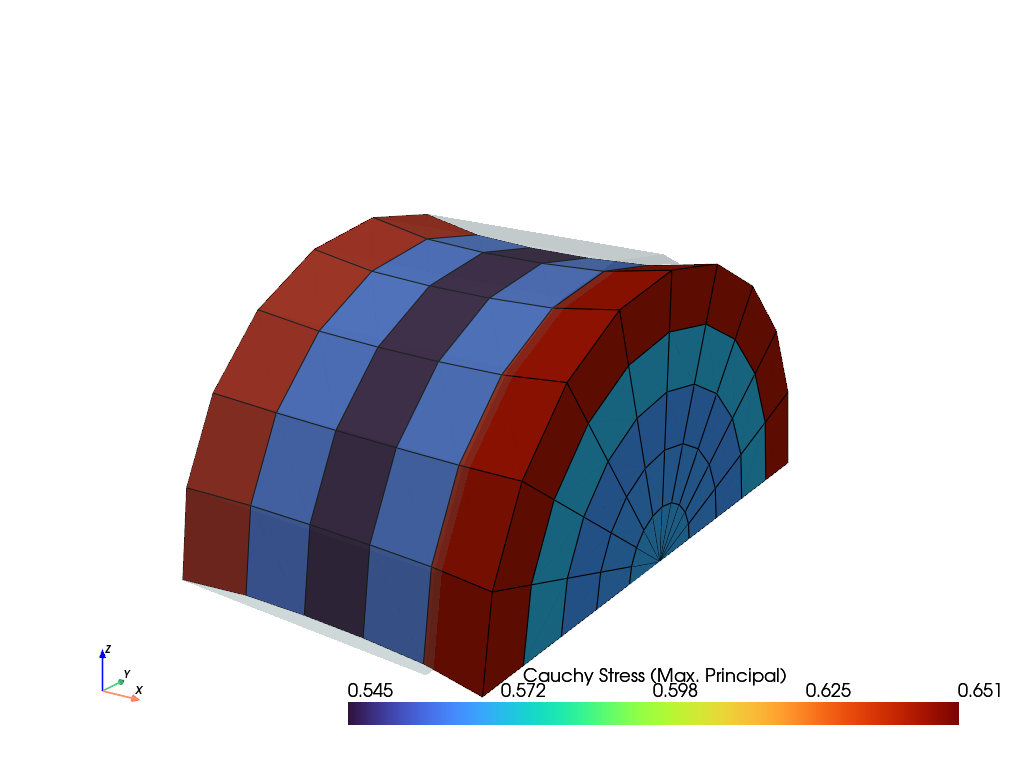
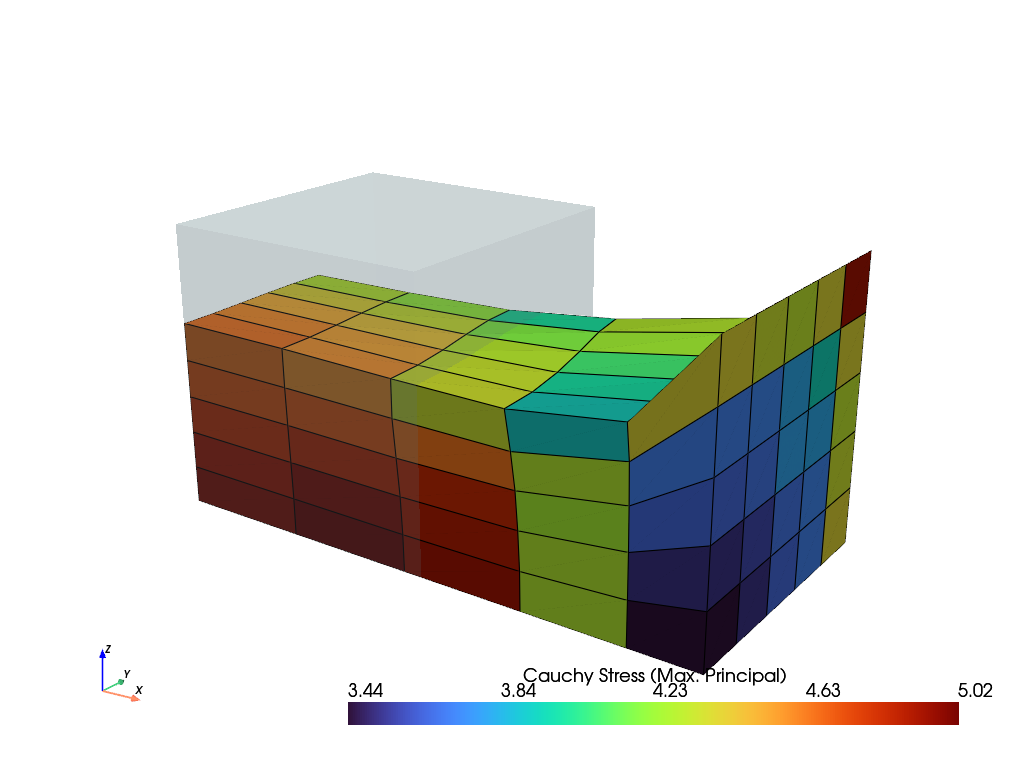
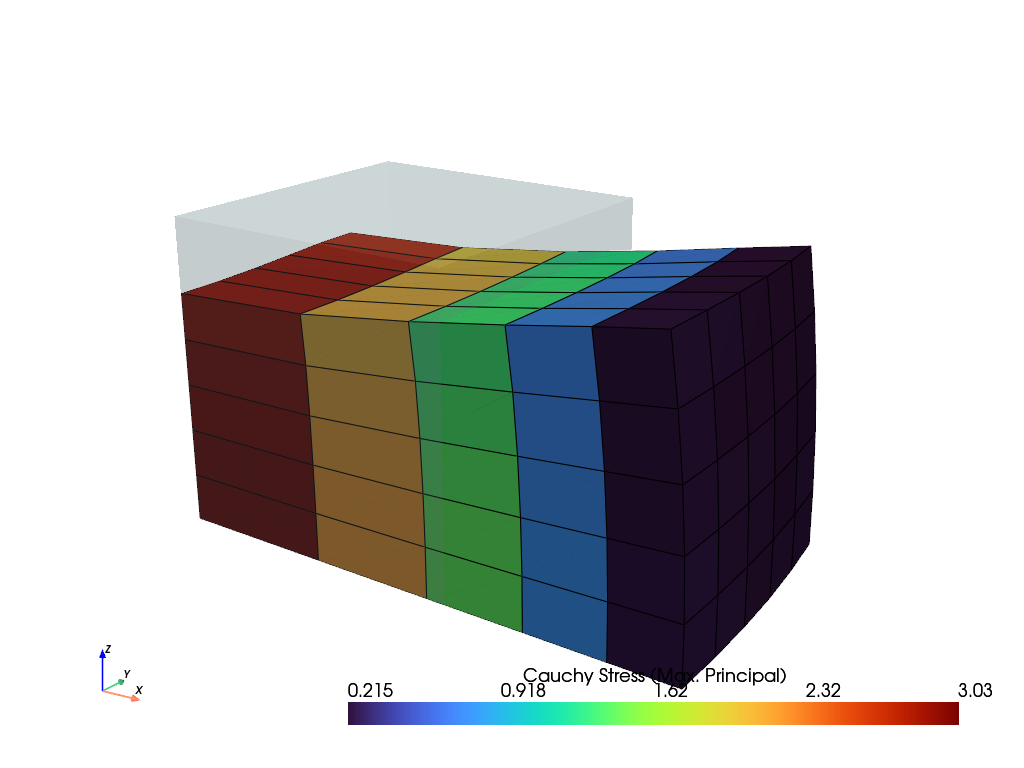
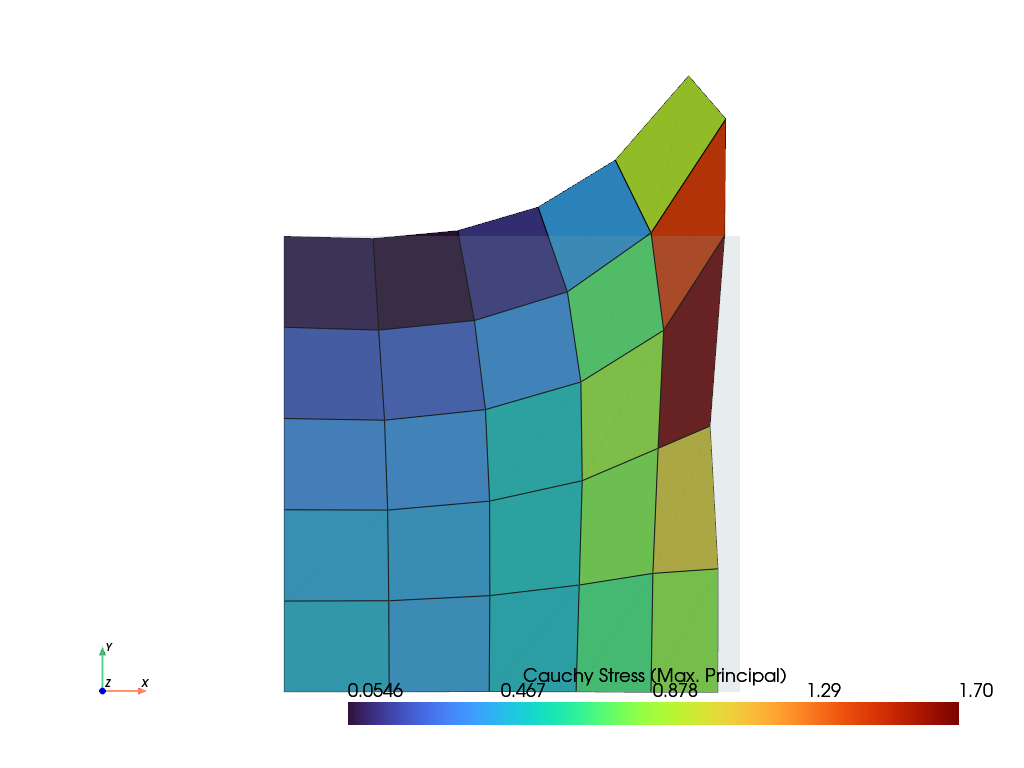
- class felupe.SolidBodyCauchyStress(field, cauchy_stress=None)[source]#
Bases:
objectA Cauchy stress boundary on a solid body.
- Parameters:
field (FieldContainer) – A field container with fields created on a boundary region.
stress (ndarray of shape (3, 3, ...) or None, optional) – The prescribed Cauchy stress components \(\sigma_{ij}\) (default is None). If None, all Cauchy stress components are set to zero.
Notes
\[\delta W_{ext} = \int_{\partial V} \delta \boldsymbol{u} \cdot \boldsymbol{\sigma}\ d\boldsymbol{a} = \int_{\partial V} \delta \boldsymbol{u} \cdot \boldsymbol{\sigma} J \boldsymbol{F}^{-T}\ d\boldsymbol{A}\]Examples
>>> import numpy as np >>> import felupe as fem >>> >>> mesh = fem.Rectangle(n=6) >>> region = fem.RegionQuad(mesh) >>> field = fem.FieldContainer([fem.FieldAxisymmetric(region, dim=2)]) >>> >>> boundaries = {"fixed": fem.Boundary(field[0], fx=0)} >>> solid = fem.SolidBody(umat=fem.NeoHooke(mu=1, bulk=2), field=field) >>> >>> mask = np.logical_and(mesh.x == 1, mesh.y > 0.5) >>> region_stress = fem.RegionQuadBoundary( ... mesh=mesh, ... mask=mask, # select a subset of faces on the surface ... ensure_3d=True, # True for axisymmetric/plane strain ... ) >>> field_boundary = fem.FieldContainer([fem.FieldAxisymmetric(region_stress, dim=2)]) >>> stress = fem.SolidBodyCauchyStress(field=field_boundary) >>> >>> table = ( ... fem.math.linsteps([0, 1], num=5, axis=1, axes=9) ... + fem.math.linsteps([0, 1], num=5, axis=3, axes=9) ... ).reshape(-1, 3, 3) >>> >>> step = fem.Step( ... items=[solid, stress], ramp={stress: 1.0 * table}, boundaries=boundaries ... ) >>> job = fem.Job(steps=[step]).evaluate() >>> solid.plot("Principal Values of Cauchy Stress").show()
- class felupe.PointLoad(field, points, values=None, apply_on=0, axisymmetric=False)[source]#
Bases:
objectA point load with methods for the assembly of sparse vectors/matrices, applied on the n-th field.
- Parameters:
field (FieldContainer) – A field container with fields created on a region.
points (list of int) – A list with point ids where the values are applied.
values (float or array_like or None, optional) – Values at points (default is None). If None, the values are set to zero.
apply_on (int, optional) – The n-th field on which the point load is applied (default is 0).
axisymmetric (bool, optional) – A flag to multiply the assembled vector and matrix by a scaling factor of \(2 \pi\) (default is False).
Examples
>>> import felupe as fem >>> >>> mesh = fem.mesh.Line(n=3) >>> element = fem.element.Line() >>> quadrature = fem.GaussLegendre(order=1, dim=1) >>> >>> region = fem.Region(mesh, element, quadrature) >>> field = fem.FieldContainer([fem.Field(region, dim=1)]) >>> >>> load = fem.PointLoad(field, [1, 2], values=[[3], [5]]) >>> >>> vector = load.assemble.vector() >>> vector.toarray() array([[0.], [3.], [5.]])
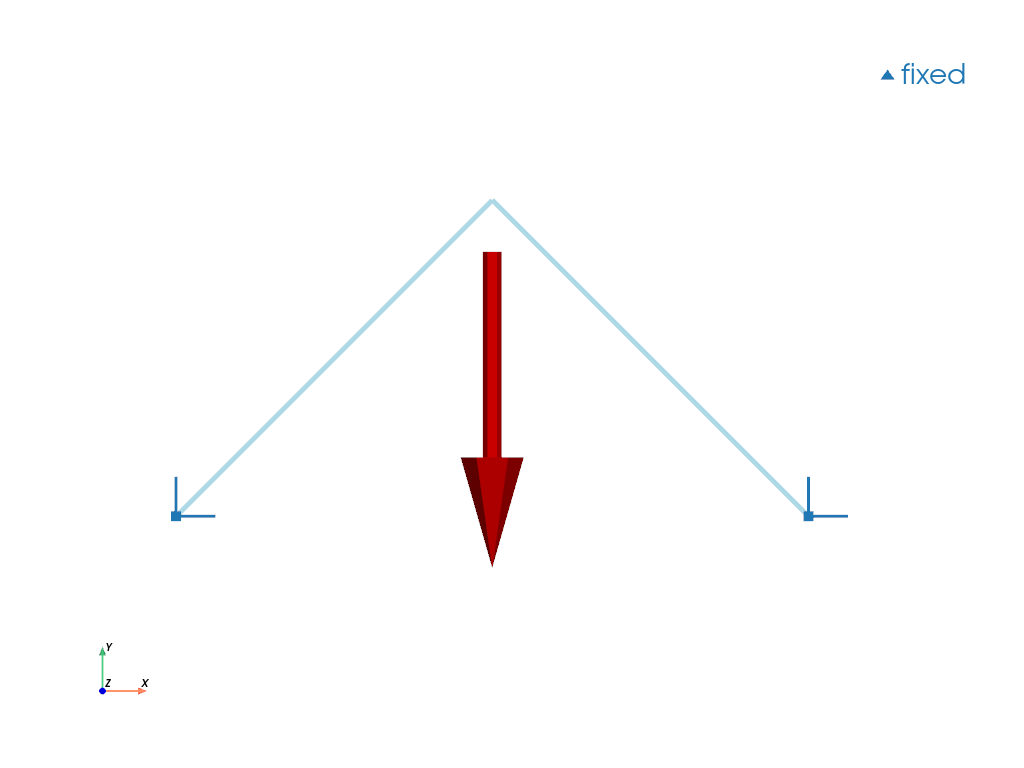
- class felupe.TrussBody(umat, field, area, statevars=None)[source]#
Bases:
SolidA Truss body with methods for the assembly of sparse vectors/matrices.
- Parameters:
umat (class) – A class which provides methods for evaluating the gradient and the hessian of the strain energy density function per unit undeformed volume. The function signatures must be
dψdλ, ζ_new = umat.gradient([λ, ζ])for the gradient andd2ψdλdλ = umat.hessian([λ, ζ])for the hessian of the strain energy density function \(\psi(\lambda)\), where \(\lambda\) is the stretch and \(\zeta\) holds the array of internal state variables.field (FieldContainer) – A field container with one or more fields.
area (float or ndarray) – The cross-sectional areas of the trusses.
statevars (ndarray or None, optional) – Array of initial internal state variables (default is None).
Notes
For a truss element the stretch is evaluated as given in Eq. (17)
(17)#\[\Lambda = \sqrt{\frac{l^2}{L^2}}\]with the squared undeformed and deformed lengths, denoted in Eqs. (18).
(18)#\[\begin{split}l^2 &= \boldsymbol{\Delta x}^T \boldsymbol{\Delta x} \\ L^2 &= \boldsymbol{\Delta X}^T \boldsymbol{\Delta X}\end{split}\]This enables the Biot strain measure, see Eq. (19).
(19)#\[E_{11} = \Lambda - 1\]The normal force of a truss depends directly on the geometric exactly defined strain measure \(E_{11}\). For the general case of a nonlinear material behaviour the normal force is defined as given in Eq. (20)
(20)#\[N = S_{11}(E_{11})~A\]and the derivative according to Eq. (21).
(21)#\[\frac{\partial N}{\partial E_{11}} = \frac{ \partial S_{11}(E_{11}) }{\partial E_{11}}~A\]For the case of a linear elastic material this reduces to Eqs. (22).
(22)#\[\begin{split}S_{11}(E_{11}) &= E~E_{11} \\ N &= EA~E_{11} \\ \frac{\partial N}{\partial E_{11}} &= EA\end{split}\]The (nonlinear) fixing force column vector may be expressed as a function of the elemental force \(N_k\) and the deformed unit vector \(\boldsymbol{n}_k\), see Eq. (23).
(23)#\[\begin{split}\boldsymbol{r}_k = \begin{bmatrix} \boldsymbol{r}_A \\ \boldsymbol{r}_E \end{bmatrix} = N_k \begin{pmatrix} -\boldsymbol{n}_k \\ \phantom{-}\boldsymbol{n}_k \end{pmatrix}\end{split}\]For a truss the stiffness matrix is divided into four block matrices of the same components but with different signs, see Eq. (24).
(24)#\[\begin{split}\boldsymbol{K}_{k~(6,6)} = \begin{bmatrix} \boldsymbol{K}_{AA} & \boldsymbol{K}_{AE}\\ \boldsymbol{K}_{EA} & \boldsymbol{K}_{EE} \end{bmatrix} = \begin{pmatrix} \phantom{-}\boldsymbol{K}_{EE} & -\boldsymbol{K}_{EE}\\ -\boldsymbol{K}_{EE} & \phantom{-}\boldsymbol{K}_{EE} \end{pmatrix}\end{split}\]A change in the fixing force vector at the end node E w.r.t. a small change of the displacements at node E is defined as the tangent stiffnes EE, see Eq. (25).
(25)#\[\begin{split}\boldsymbol{K}_{EE} &= \frac{ \partial \boldsymbol{r}_E}{\partial \boldsymbol{U}_E } \\ \boldsymbol{K}_{EE} &= \frac{A}{L} ~ \frac{ \partial S_{11}(E_{11}) }{\partial E_{11}} \boldsymbol{n} \otimes \boldsymbol{n} + \frac{N}{l} \left( \boldsymbol{1} - \boldsymbol{n} \otimes \boldsymbol{n} \right)\end{split}\]Examples
>>> import felupe as fem >>> >>> mesh = fem.Mesh( ... points=[[0, 0], [1, 1], [2.0, 0]], ... cells=[[0, 1], [1, 2]], ... cell_type="line", ... ) >>> region = fem.RegionTruss(mesh) >>> field = fem.Field(region, dim=2).as_container() >>> boundaries = fem.BoundaryDict(fixed=fem.Boundary(field[0], fy=0)) >>> >>> umat = fem.LinearElastic1D(E=[1, 1]) >>> truss = fem.TrussBody(umat, field, area=[1, 1]) >>> load = fem.PointLoad(field, points=[1]) >>> >>> table = fem.math.linsteps([0, 1], num=5, axis=1, axes=2) >>> ramp = {load: table * -0.1} >>> step = fem.Step(items=[truss, load], ramp=ramp, boundaries=boundaries) >>> job = fem.Job(steps=[step]).evaluate() >>> >>> mesh.plot( ... plotter=load.plot(plotter=boundaries.plot(), scale=0.5), ... line_width=5 ... ).show()
- class felupe.Step(items, ramp=None, boundaries=None)[source]#
Bases:
objectA Step with multiple substeps, subsequently depending on the solution of the previous substep.
- Parameters:
items (list of SolidBody, SolidBodyNearlyIncompressible, SolidBodyPressure, SolidBodyGravity, PointLoad, MultiPointConstraint or MultiPointContact) – A list of items with methods for the assembly of sparse vectors/matrices.
ramp (dict, optional) – A dict with
Boundaryoritem-keys which holds the array of values to ramp (default is None). If None, only one substep is evaluated.boundaries (dict of Boundary, optional) – A dict with
Boundaryconditions (default is None).
Examples
>>> import felupe as fem >>> >>> mesh = fem.Cube(n=6) >>> region = fem.RegionHexahedron(mesh) >>> field = fem.FieldContainer([fem.Field(region, dim=3)]) >>> >>> boundaries = fem.dof.symmetry(field[0]) >>> boundaries["clamped"] = fem.Boundary(field[0], fx=1, skip=(True, False, False)) >>> boundaries["move"] = fem.Boundary(field[0], fx=1, skip=(False, True, True)) >>> >>> umat = fem.NeoHooke(mu=1, bulk=2) >>> solid = fem.SolidBody(umat, field) >>> >>> move = fem.math.linsteps([0, 1], num=5) >>> step = fem.Step(items=[solid], ramp={boundaries["move"]: move}, boundaries=boundaries) >>> >>> job = fem.Job(steps=[step]).evaluate() >>> ax = solid.plot("Principal Values of Cauchy Stress").show()
See also
JobA job with a list of steps and a method to evaluate them.
CharacteristicCurveA job with a list of steps and a method to evaluate them. Force-displacement curve data is tracked during evaluation for a given
Boundary.
- class felupe.Job(steps, callback=<function Job.<lambda>>, plugins=None, **kwargs)[source]#
Bases:
objectA job with a list of steps and a method to evaluate them.
- Parameters:
steps (list of Step) – A list with steps, where each step subsequently depends on the solution of the previous step.
callback (callable, optional) – A callable which is called after each completed substep. Function signature must be
lambda stepnumber, substepnumber, substep, **kwargs: None, wheresubstepis an instance ofNewtonResult. The field container of the completed substep is available assubstep.x. Default iscallback=lambda stepnumber, substepnumber, substep, **kwargs: None.plugins (list or None, optional) – A list of plugins with hooks to be used during evaluation. Available hooks are
before_job,after_job,before_step,after_stepandafter_substep. Each hook takes the job and the current state as arguments. All hooks are optional. Default is None, which is equivalent to an empty list. Simple callable plugins are dispatched at theafter_substephook.**kwargs (dict, optional) – Optional keyword-arguments for the
callbackfunction.
- timetrack#
A list with times at which the results are written to the XDMF result file.
- fnorms#
List with norms of the objective function for each completed substep of each step. See also class:~felupe.tools.NewtonResult.
Examples
>>> import felupe as fem >>> >>> mesh = fem.Cube(n=6) >>> region = fem.RegionHexahedron(mesh) >>> field = fem.FieldContainer([fem.Field(region, dim=3)]) >>> >>> boundaries = fem.dof.symmetry(field[0]) >>> boundaries["clamped"] = fem.Boundary(field[0], fx=1, skip=(True, False, False)) >>> boundaries["move"] = fem.Boundary(field[0], fx=1, skip=(False, True, True)) >>> >>> umat = fem.NeoHooke(mu=1, bulk=2) >>> solid = fem.SolidBody(umat, field) >>> >>> move = fem.math.linsteps([0, 1], num=5) >>> step = fem.Step(items=[solid], ramp={boundaries["move"]: move}, boundaries=boundaries) >>> >>> job = fem.Job(steps=[step]).evaluate() >>> solid.plot("Principal Values of Cauchy Stress").show()
See also
StepA Step with multiple substeps, subsequently depending on the solution of the previous substep.
CharacteristicCurveA job with a list of steps and a method to evaluate them. Force-displacement curve data is tracked during evaluation for a given
Boundary.tools.NewtonResultA data class which represents the result found by Newton’s method.
- evaluate(filename=None, mesh=None, point_data=None, cell_data=None, point_data_default=True, cell_data_default=True, verbose=None, parallel=False, tqdm='tqdm', **kwargs)[source]#
Evaluate the steps.
- Parameters:
filename (str or None, optional) – The filename of the XDMF result file. Must include the file extension
my_result.xdmf. If None, no result file is written during evaluation. Default is None.mesh (Mesh or None, optional) – A mesh which is used for the XDMF time series writer. If None, it is taken from the field of the first item of the first step if no keyword argument
x0is given. If None andx0=field, the mesh is taken from thex0field container. Default is None.point_data (dict or None, optional) – Additional dict of point-data for the meshio XDMF time series writer.
cell_data (dict or None, optional) – Additional dict of cell-data for the meshio XDMF time series writer.
point_data_default (bool, optional) – Flag to write default point-data to the XDMF result file. This includes
"Displacement". Default is True.cell_data_default (bool, optional) – Flag to write default cell-data to the XDMF result file. This includes
"Principal Values of Logarithmic Strain","Logarithmic Strain"and"Deformation Gradient". Default is True.verbose (bool or int or None, optional) – Verbosity level to control how messages are printed during evaluation. If 1 or True and
tqdmis installed, a progress bar is shown. Iftqdmis missing or verbose is 2, more detailed text-based messages are printed. Default is None. If None, verbosity is set to True. If None and the environmental variable FELUPE_VERBOSE is set and its value is nottrue, then logging is turned off.parallel (bool, optional) – Flag to use a threaded version of
numpy.einsum()during assembly. Requireseinsumt. This may add additional overhead to small-sized problems. Default is False.tqdm (str, optional) – If verbose is True, choose a backend for
tqdm(“tqdm”,"auto"or"notebook". Default is"tqdm".**kwargs (dict) – Optional keyword arguments for
generate(). Ifparallel=True, it is added askwargs["parallel"] = Trueto the dict of additional keyword arguments. Ifx0is present inkwargs.keys(), it is used as the mesh for the XDMF time series writer.
- Returns:
The job object.
- Return type:
Notes
Requires
meshioandh5pyiffilenameis not None. Also requirestqdmfor an interactive progress bar ifverbose=True.See also
StepA Step with multiple substeps, subsequently depending on the solution of the previous substep.
CharacteristicCurveA job with a list of steps and a method to evaluate them. Force-displacement curve data is tracked during evaluation for a given
Boundarycondition.tools.NewtonResultA data class which represents the result found by Newton’s method.
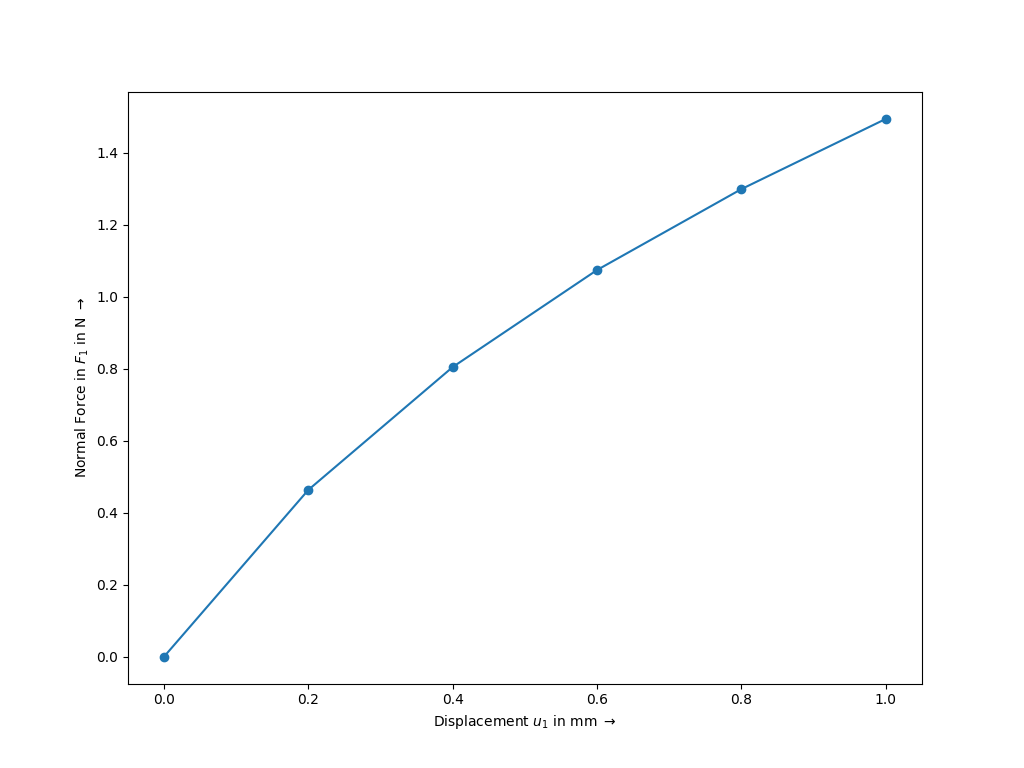
- class felupe.CharacteristicCurve(steps, boundary, items=None, callback=<function CharacteristicCurve.<lambda>>, **kwargs)[source]#
Bases:
JobA job with a list of steps and a method to evaluate them. Force-displacement curve data is tracked during evaluation for a given
Boundaryby a built-incallback.- Parameters:
steps (list of Step) – A list with steps, where each step subsequently depends on the solution of the previous step.
items (list of SolidBody, SolidBodyNearlyIncompressible, SolidBodyPressure, SolidBodyGravity, PointLoad, MultiPointConstraint, MultiPointContact or None, optional) – A list of items with methods for the assembly of sparse vectors/matrices which are used to evaluate the sum of reaction forces. If None, the total reaction forces from the
NewtonResultof the substep are used.callback (callable, optional) – A callable which is called after each completed substep. Function signature must be
lambda stepnumber, substepnumber, substep, **kwargs: None, wheresubstepis an instance ofNewtonResult. The field container of the completed substep is available assubstep.x. Default iscallback=lambda stepnumber, substepnumber, substep, **kwargs: None.**kwargs (dict, optional) – Optional keyword-arguments for the
callbackfunction.
Examples
>>> import felupe as fem >>> >>> mesh = fem.Cube(n=6) >>> region = fem.RegionHexahedron(mesh) >>> field = fem.FieldContainer([fem.Field(region, dim=3)]) >>> >>> boundaries = dict() >>> boundaries["fixed"] = fem.Boundary(field[0], fx=0, skip=(False, False, False)) >>> boundaries["clamped"] = fem.Boundary(field[0], fx=1, skip=(True, False, False)) >>> boundaries["move"] = fem.Boundary(field[0], fx=1, skip=(False, True, True)) >>> >>> umat = fem.NeoHooke(mu=1, bulk=2) >>> solid = fem.SolidBody(umat, field) >>> >>> move = fem.math.linsteps([0, 1], num=5) >>> step = fem.Step(items=[solid], ramp={boundaries["move"]: move}, boundaries=boundaries) >>> >>> job = fem.CharacteristicCurve(steps=[step], boundary=boundaries["move"]).evaluate() >>> solid.plot("Principal Values of Cauchy Stress").show()
>>> fig, ax = job.plot( ... xlabel=r"Displacement $u_1$ in mm $\rightarrow$", ... ylabel=r"Normal Force in $F_1$ in N $\rightarrow$", ... marker="o", ... )
See also
StepA Step with multiple substeps, subsequently depending on the solution of the previous substep.
JobA job with a list of steps and a method to evaluate them.
tools.NewtonResultA data class which represents the result found by Newton’s method.
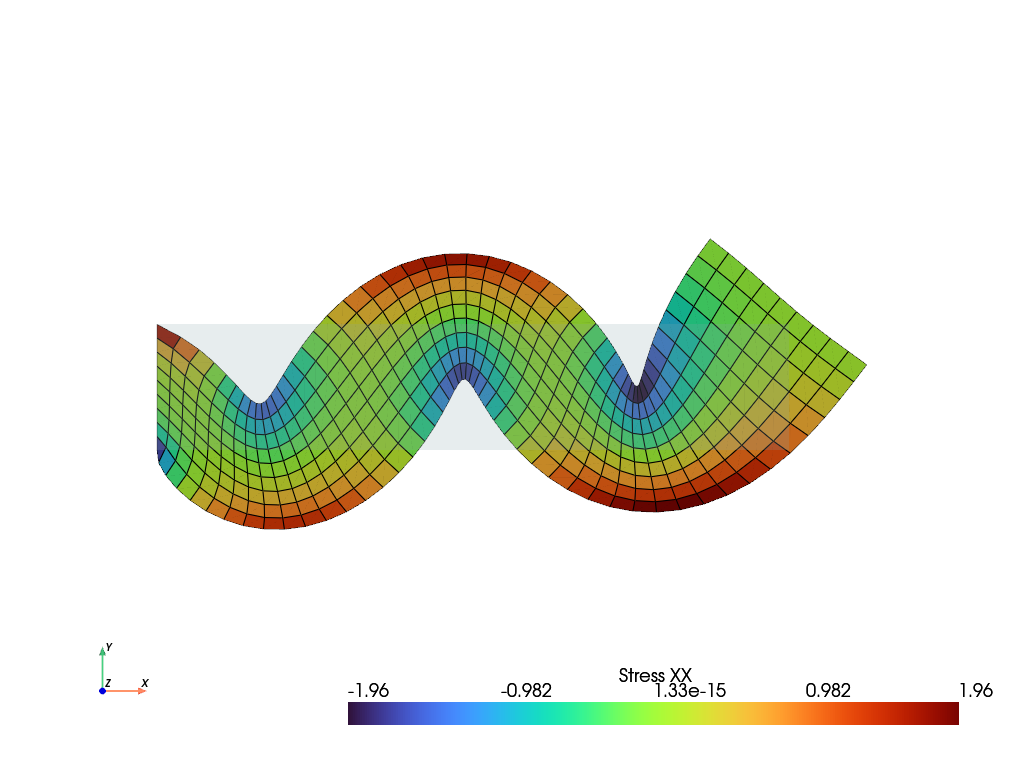
- class felupe.FreeVibration(items, boundaries=None)[source]#
Bases:
objectA Free-Vibration Step/Job.
- Parameters:
Notes
Note
Boundary conditions with non-zero values are not supported.
Examples
>>> import felupe as fem >>> import numpy as np >>> >>> mesh = fem.Rectangle(b=(5, 1), n=(50, 10)) >>> region = fem.RegionQuad(mesh) >>> field = fem.FieldContainer([fem.FieldPlaneStrain(region, dim=2)]) >>> >>> boundaries = dict(left=fem.Boundary(field[0], fx=0)) >>> solid = fem.SolidBody(fem.LinearElastic(E=2.5, nu=0.25), field, density=1.0) >>> modal = fem.FreeVibration(items=[solid], boundaries=boundaries).evaluate() >>> >>> eigenvector, frequency = modal.extract(n=4, inplace=True) >>> solid.plot("Stress", component=0).show()
- class felupe.AnimationWriterPlugin(items, filename='animation.gif', framerate=5, quality=5, zoom_camera=1.0, reset_camera=True, show_text=True, take_screenshots=False, **kwargs)[source]#
Bases:
PluginA job plugin to write an animation file during job evaluation.
- Parameters:
items (list) – The items to plot.
filename (str or None, optional) – The filename of the animation file. Default is “animation.gif”. Supported formats are GIF and MP4 (or any other format supported by PyVista). If None, no animation file will be written. Default is “animation.gif”.
framerate (int, optional) – The framerate of the animation. Default is 5.
quality (int, optional) – The quality of the movie. Default is 5. This is only used for movie formats, not for GIFs.
zoom_camera (float, optional) – The zoom factor for the camera. Default is 1.0.
reset_camera (bool, optional) – Whether to reset the camera before each frame. Default is True.
show_text (bool, optional) – Whether to show text on the plot. Default is True.
take_screenshots (bool or None, optional) – Whether to take screenshots for all substeps per step. If True, the screenshots will be saved in the “figures” folder. Default is False.
**kwargs (dict, optional) – Additional keyword arguments to pass to the plot method of the items.
Notes
This plugin should be used with
off_screen=True. While it is possible to show the plotter during the job evaluation, it may flicker.Examples
>>> import felupe as fem >>> >>> mesh = fem.Cube(n=6) >>> region = fem.RegionHexahedron(mesh) >>> field = fem.FieldContainer([fem.Field(region, dim=3)]) >>> >>> boundaries = fem.dof.uniaxial( ... field, clamped=True, return_loadcase=False ... ) >>> umat = fem.NeoHooke(mu=1, bulk=2) >>> solid = fem.SolidBody(umat=umat, field=field) >>> >>> move = fem.math.linsteps([0, 1, 0], num=5) >>> ramp = {boundaries["move"]: move} >>> step = fem.Step(items=[solid], ramp=ramp, boundaries=boundaries) >>> >>> animation = fem.AnimationWriterPlugin( ... items=[field], ... filename="animation.gif", ... name="Principal Values of Logarithmic Strain", ... ) >>> job = fem.Job(steps=[step], plugins=[animation]) >>> job.evaluate()
See also
felupe.JobA job with a list of steps and a method to evaluate them.
- after_iteration(context, state)[source]#
This method is called after a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- after_job(context, state)[source]#
This method is called after the evaluation of a job.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- after_substep(context, state)[source]#
This method is called after a substep.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_job(context, state)[source]#
This method is called before the evaluation of a job.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- class felupe.CharacteristicCurvePlugin(boundary, items=None, fun=<function force>, **kwargs)[source]#
Bases:
PluginA job plugin to record a characteristic curve. Force-displacement curve data is tracked during evaluation for a given
Boundary. Optionally, the- Parameters:
boundary (felupe.Boundary) – The boundary condition for which to record the characteristic curve.
items (list of SolidBody, SolidBodyNearlyIncompressible, SolidBodyPressure, SolidBodyGravity, PointLoad, MultiPointConstraint, MultiPointContact or None, optional) – A list of items with methods for the assembly of sparse vectors/matrices which are used to evaluate the sum of reaction forces. If None, the total reaction forces from the
NewtonResultof the substep are used.fun (felupe.tools.force or felupe.tools.moment, optional) – A function to calculate the y-data of the curve from the x-data.
**kwargs (dict, optional) – Additional keyword arguments for the function
fun.
Examples
>>> import felupe as fem >>> >>> mesh = fem.Cube(n=6) >>> region = fem.RegionHexahedron(mesh) >>> field = fem.FieldContainer([fem.Field(region, dim=3)]) >>> >>> boundaries = dict() >>> boundaries["fixed"] = fem.Boundary(field[0], fx=0, skip=(False, False, False)) >>> boundaries["clamped"] = fem.Boundary(field[0], fx=1, skip=(True, False, False)) >>> boundaries["move"] = fem.Boundary(field[0], fx=1, skip=(False, True, True)) >>> >>> umat = fem.NeoHooke(mu=1, bulk=2) >>> solid = fem.SolidBody(umat, field) >>> >>> move = fem.math.linsteps([0, 1], num=5) >>> step = fem.Step(items=[solid], ramp={boundaries["move"]: move}, boundaries=boundaries) >>> >>> curve = fem.CharacteristicCurvePlugin(boundary=boundaries["move"]) >>> job = fem.Job(steps=[step], plugins=[curve]).evaluate() >>> solid.plot("Principal Values of Cauchy Stress").show()
>>> fig, ax = curve.plot( ... xlabel=r"Displacement $u_1$ in mm $\rightarrow$", ... ylabel=r"Normal Force in $F_1$ in N $\rightarrow$", ... marker="o", ... )
See also
felupe.JobA job with a list of steps and a method to evaluate them.
- after_substep(context, state)[source]#
This method is called after a substep.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- plot(x=None, y=None, xaxis=0, yaxis=0, xlabel=None, ylabel=None, xscale=1.0, yscale=1.0, xoffset=0.0, yoffset=0.0, gradient=False, swapaxes=False, ax=None, items=None, **kwargs)[source]#
Plot force-displacement characteristic curves on a pre-evaluated job, tracked on a given
Boundary.- Parameters:
x (list of ndarray or None, optional) – A list with arrays of displacement data. If None, the displacement is taken from the first field of the field container from each completed substep. The displacement data is then taken from the first point of the tracked
Boundary. Default is None.y (list of ndarray or None, optional) – A list with arrays of reaction force data. If None, the force is taken from the
NewtonResultof each completed substep. Default is None.xaxis (int, optional) – The axis for the displacement data (default is 0).
yaxis (int, optional) – The axis for the reaction force data (default is 0).
xlabel (str or None, optional) – The label of the x-axis (default is None).
ylabel (str or None, optional) – The label of the y-axis (default is None).
xscale (float, optional) – A scaling factor for the displacement data (default is 1.0).
yscale (float, optional) – A scaling factor the reaction force data (default is 1.0).
xoffset (float, optional) – An offset for the displacement data (default is 0.0).
yoffset (float, optional) – An offset for the reaction force data (default is 0.0).
gradient (bool, optional) – A flag to plot the gradient of the y-data. Uses
numpy.gradient(edge_order=2). The gradient data is set tonp.nanfor absolute values greater than the mean value plus two times the standard deviation. Default is False.swapaxes (bool, optional) – A flag to flip the plot (x, y) to (y, x). Also changes the labels.
ax (matplotlib.axes.Axes) – An axes object where the plot is placed in.
items (slice, ndarray or None) – Indices or a range of data points to plot. If None, all data points are plotted (default is None).
**kwargs (dict) – Additional keyword arguments for plotting in
ax.plot(**kwags).
- Returns:
fig (matplotlib.figure.Figure) – The figure object where the plot is placed in.
ax (matplotlib.axes.Axes) – The axes object where the plot is placed in.
- to_arrays(x=None, y=None, xaxis=0, yaxis=0, xscale=1.0, yscale=1.0, xoffset=0.0, yoffset=0.0, gradient=False, items=None)[source]#
Return force-displacement characteristic curves on a pre-evaluated job, tracked on a given
Boundaryas arrays.- Parameters:
x (list of ndarray or None, optional) – A list with arrays of displacement data. If None, the displacement is taken from the first field of the field container from each completed substep. The displacement data is then taken from the first point of the tracked
Boundary. Default is None.y (list of ndarray or None, optional) – A list with arrays of reaction force data. If None, the force is taken from the
NewtonResultof each completed substep. Default is None.xaxis (int, optional) – The axis for the displacement data (default is 0).
yaxis (int, optional) – The axis for the reaction force data (default is 0).
xscale (float, optional) – A scaling factor for the displacement data (default is 1.0).
yscale (float, optional) – A scaling factor the reaction force data (default is 1.0).
xoffset (float, optional) – An offset for the displacement data (default is 0.0).
yoffset (float, optional) – An offset for the reaction force data (default is 0.0).
gradient (bool, optional) – A flag to plot the gradient of the y-data. Uses
numpy.gradient(edge_order=2). The gradient data is set tonp.nanfor absolute values greater than the mean value plus two times the standard deviation. Default is False.items (slice, ndarray or None) – Indices or a range of data points to plot. If None, all data points are plotted (default is None).
- Returns:
x (ndarray) – The final x-data.
y (ndarray) – The final y-data.
- class felupe.ProgressPlugin(verbose=None, tqdm='tqdm')[source]#
Bases:
PluginA job plugin to output the progress of a job evaluation in the terminal.
- Parameters:
verbose (bool or int or None, optional) – Verbosity level to control how messages are printed during evaluation. If 1 or True and
tqdmis installed, a progress bar is shown. Iftqdmis missing or verbose is 2, more detailed text-based messages are printed. Default is None. If None, verbosity is set to True. If None and the environmental variable FELUPE_VERBOSE is set and its value is nottrue, then logging is turned off.tqdm (str, optional) – If verbose is True, choose a backend for
tqdm(“tqdm”,"auto"or"notebook". Default is"tqdm".
Notes
Requires
tqdmfor an interactive progress bar ifverbose=True.See also
felupe.JobA job with a list of steps and a method to evaluate them.
- after_iteration(context, state)[source]#
This method is called after a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- after_job(context, state)[source]#
This method is called after the evaluation of a job.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- after_linear_solve(context, state)[source]#
This method is called after the linear solver inside a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- after_newton(context, state)[source]#
This method is called after the Newton-Raphson solver.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- after_substep(context, state)[source]#
This method is called after a substep.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_job(context, state)[source]#
This method is called before the evaluation of a job.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- before_linear_solve(context, state)[source]#
This method is called before the linear solver inside a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_newton(context, state)[source]#
This method is called before the Newton-Raphson solver.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_step(context, state)[source]#
This method is called before a step.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- class felupe.XDMFWriterPlugin(filename=None, mesh=None, point_data=None, cell_data=None, point_data_default=False, cell_data_default=False, kwargs=None)[source]#
Bases:
PluginA job plugin to write XDMF files during job evaluation.
Notes
Requires
h5py.See also
felupe.JobA job with a list of steps and a method to evaluate them.
- after_iteration(context, state)[source]#
This method is called after a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- after_job(context, state)[source]#
This method is called after the evaluation of a job.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- after_substep(context, state)[source]#
This method is called after a substep.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_job(context, state)[source]#
This method is called before the evaluation of a job.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- class felupe.Plugin[source]#
Bases:
objectBase class for plugins.
Notes
All methods (hooks) are optional and will be called at the appropriate time during the simulation. The context and state objects are passed to each method, allowing a plugin to access and / or modify a simulation as needed.
The
Contextobject holds information about the current job, step or substep. state depends on the method and can be used to access the current state, i.e.JobStateorIterationState.Note
All methods are optional.
See also
felupe.JobA job with a list of steps and a method to evaluate them.
felupe.EventDispatcherA class to dispatch events to plugins during evaluation.
felupe.ContextA class to keep track of the context of a Job during evaluation.
felupe.JobStateA class to keep track of the state of a Job during evaluation.
felupe.IterationStateA class to keep track of the state of an iteration.
- after_iteration(context, state)[source]#
This method is called after a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- after_job(context, state)[source]#
This method is called after the evaluation of a job.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- after_linear_solve(context, state)[source]#
This method is called after the linear solver inside a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- after_newton(context, state)[source]#
This method is called after the Newton-Raphson solver.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- after_step(context, state)[source]#
This method is called after a step.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- after_substep(context, state)[source]#
This method is called after a substep.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_iteration(context, state)[source]#
This method is called before a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_job(context, state)[source]#
This method is called before the evaluation of a job.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- before_linear_solve(context, state)[source]#
This method is called before the linear solver inside a Newton-Raphson iteration.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_newton(context, state)[source]#
This method is called before the Newton-Raphson solver.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.IterationState) – The state of the iteration.
- before_step(context, state)[source]#
This method is called before a step.
- Parameters:
context (felupe.Context) – The context object.
state (felupe.JobState) – The state of the job.
- class felupe.EventDispatcher(plugins=None)[source]#
Bases:
objectA class to dispatch events to plugins during evaluation.
- Parameters:
plugins (list or None, optional) – The list of plugins.
- class felupe.Context(job=None, step=None, substep=None)[source]#
Bases:
objectA class to keep track of the context of a Job during evaluation.
- Parameters:
job (felupe.Job or None, optional) – The job object.
step (felupe.Step or None, optional) – The step object.
substep (felupe.FieldContainer or None, optional) – The field container object.
- class felupe.JobState(stepnumber=None, substepnumber=None, time=None)[source]#
Bases:
objectA class to keep track of the state of a Job during evaluation.
- class felupe.IterationState(iteration=None, fnorm=None, xnorm=None, success=None, tol=None, error=None)[source]#
Bases:
objectA class to keep track of the state of an iteration during evaluation.
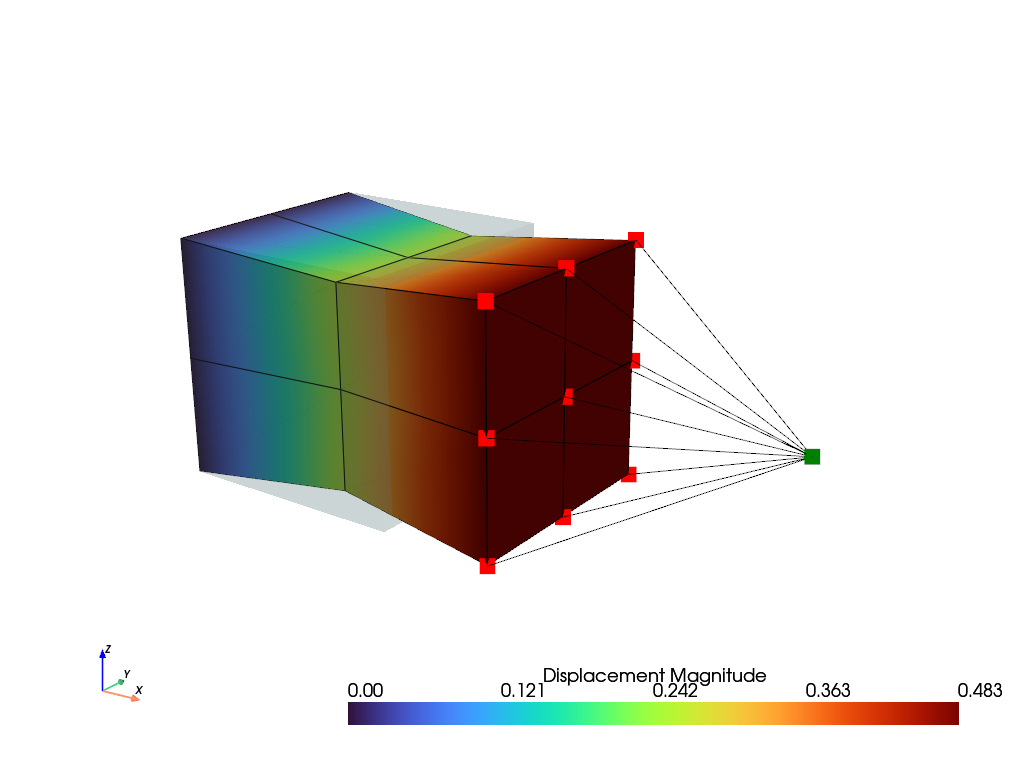
- class felupe.MultiPointConstraint(field, points, centerpoint, skip=(False, False, False), multiplier=1000.0)[source]#
A Multi-point-constraint which connects a center-point to a list of points.
- Parameters:
field (FieldContainer) – A field container with the displacement field as first field.
points ((n,) ndarray) – An array with indices of points to be connected to the center-point.
centerpoint (int) – The index of the centerpoint.
skip (3-tuple of bool, optional) – A tuple with boolean values for each axis to skip. If True, the respective axis is not connected. Default is (False, False, False).
multiplier (float, optional) – A multiplier to penalize the relative displacements between the center-point and the points. Default is 1e3.
Notes
A
MultiPointConstraintis supported as an item in aStep. It provides the assemble-methodsMultiPointConstraint.assemble.vector()andMultiPointConstraint.assemble.matrix().Note
Rotational degrees-of-freedom of the center-point are not connected to the points.
Examples
This example shows how to use a
MultiPointConstraint. An additional center-point is added to a mesh.>>> import numpy as np >>> import felupe as fem >>> >>> mesh = fem.Cube(n=3) >>> mesh.add_points([2.0, 0.5, 0.5]) >>> >>> region = fem.RegionHexahedron(mesh) >>> displacement = fem.Field(region, dim=3) >>> field = fem.FieldContainer([displacement]) >>> >>> umat = fem.NeoHooke(mu=1.0, bulk=2.0) >>> solid = fem.SolidBody(umat=umat, field=field)
A
MultiPointConstraintdefines the multi-point constraint which connects the displacement degrees of freedom of the center-point with the dofs of points located at \(x=1\).>>> import pyvista as pv >>> >>> mpc = fem.MultiPointConstraint( ... field=field, ... points=np.arange(mesh.npoints)[mesh.x == 1], ... centerpoint=-1, ... ) >>> >>> plotter = pv.Plotter() >>> actor_1 = plotter.add_points( ... mesh.points[mpc.points], ... point_size=16, ... color="red", ... ) >>> actor_2 = plotter.add_points( ... mesh.points[[mpc.centerpoint]], ... point_size=16, ... color="green", ... ) >>> mesh.plot(plotter=mpc.plot(plotter=plotter)).show()
The mesh is fixed on the left end face and a ramped
PointLoadis applied on the center-point of theMultiPointConstraint. All items are added to aStepand aJobis evaluated.>>> boundaries = {"fixed": fem.Boundary(displacement, fx=0)} >>> load = fem.PointLoad(field, points=[-1]) >>> table = fem.math.linsteps([0, 1], num=5, axis=0, axes=3) >>> >>> step = fem.Step( ... [solid, mpc, load], boundaries=boundaries, ramp={load: table} ... ) >>> job = fem.Job([step]).evaluate()
A view on the deformed mesh including the
MultiPointConstraintis plotted.>>> plotter = pv.Plotter() >>> >>> actor_1 = plotter.add_points( ... mesh.points[mpc.points] + displacement.values[mpc.points], ... point_size=16, ... color="red", ... ) >>> actor_2 = plotter.add_points( ... mesh.points[[mpc.centerpoint]] + displacement.values[[mpc.centerpoint]], ... point_size=16, ... color="green", ... ) >>> field.plot("Displacement", component=None, plotter=mpc.plot(plotter=plotter)).show()
See also
felupe.MultiPointContactA frictionless point-to-rigid (wall) contact.
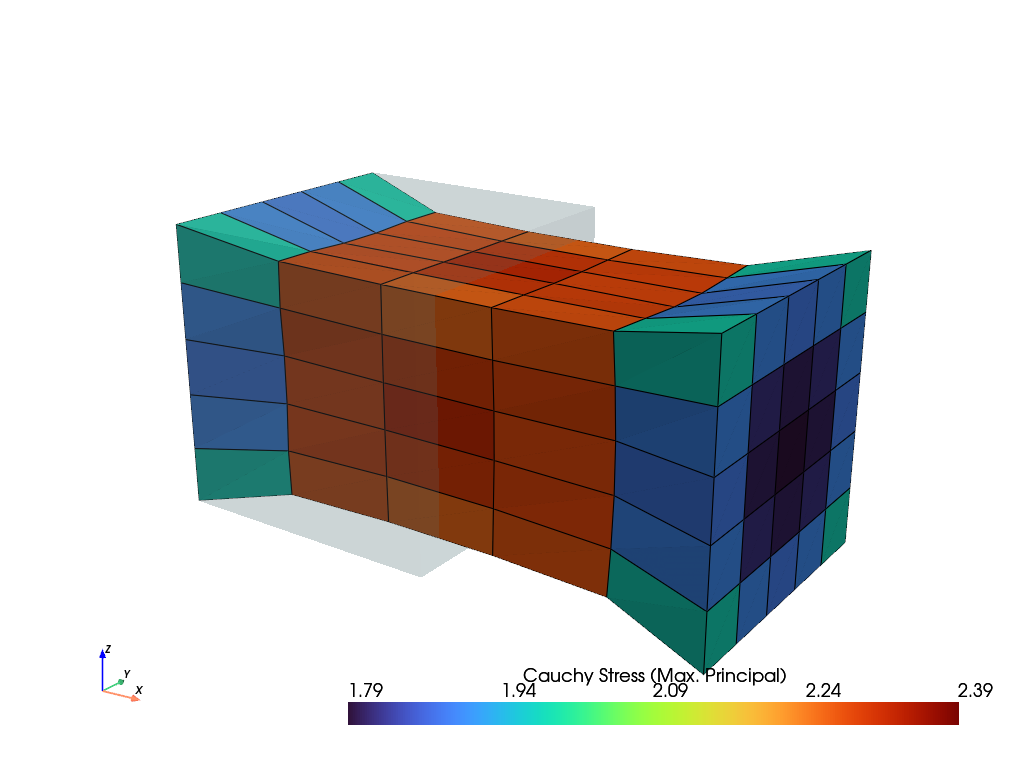
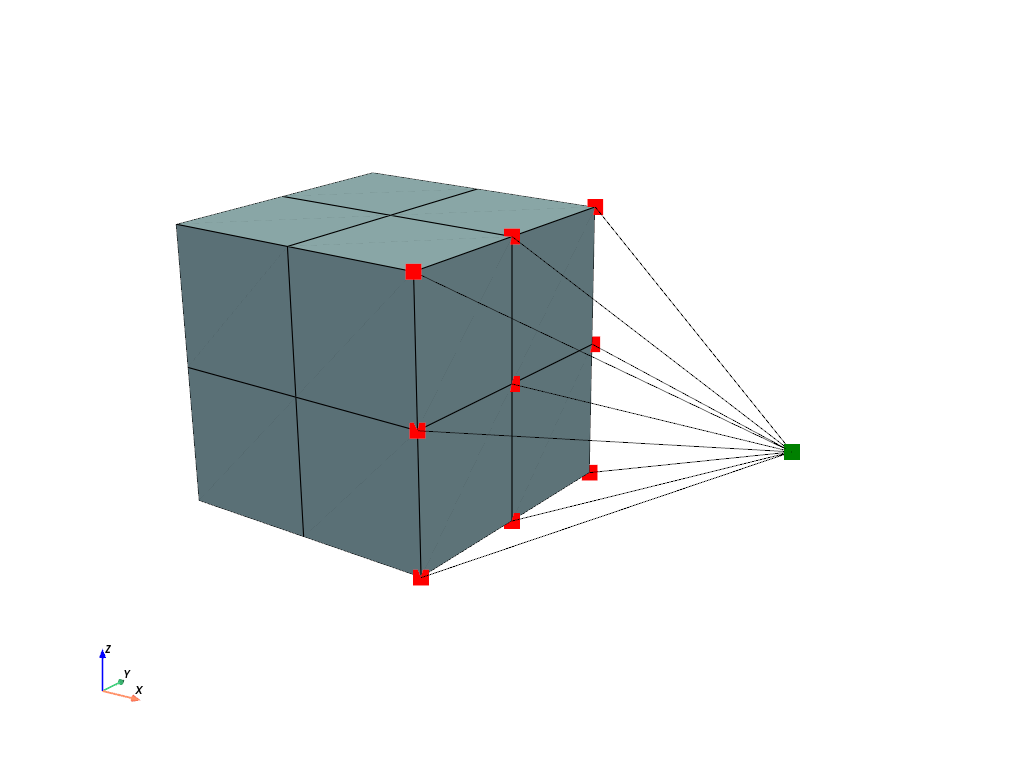
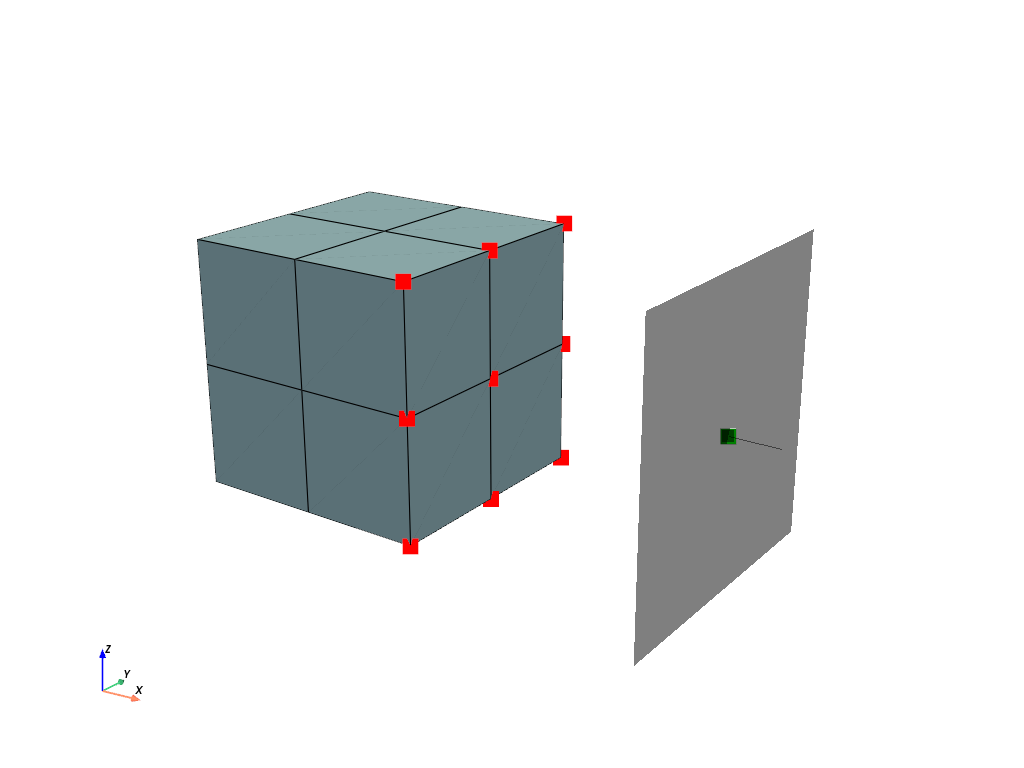
- class felupe.MultiPointContact(field, points, centerpoint, skip=(False, False, False), multiplier=1000000.0)[source]#
A frictionless point-to-rigid (wall) contact which connects a center-point to a list of points.
- Parameters:
field (FieldContainer) – A field container with the displacement field as first field.
points ((n,) ndarray) – An array with indices of points to be connected to the center-point.
centerpoint (int) – The index of the centerpoint.
skip (3-tuple of bool, optional) – A tuple with boolean values for each axis to skip. If True, the respective axis is not connected. Default is (False, False, False).
multiplier (float, optional) – A multiplier to penalize the relative displacements between the center-point and the points in contact. Default is 1e6.
Notes
A
MultiPointContactis supported as an item in aStep. It provides the assemble-methodsMultiPointContact.assemble.vector()andMultiPointContact.assemble.matrix().Examples
This example shows how to use a
MultiPointContact. An additional center-point is added to a mesh.>>> import numpy as np >>> import felupe as fem >>> >>> mesh = fem.Cube(n=3) >>> mesh.add_points([2.0, 0.5, 0.5]) >>> >>> # prevent the field-values at the center-point to be treated as dof0 >>> mesh.points_without_cells = mesh.points_without_cells[:-1] >>> >>> region = fem.RegionHexahedron(mesh) >>> displacement = fem.Field(region, dim=3) >>> field = fem.FieldContainer([displacement]) >>> >>> umat = fem.NeoHooke(mu=1.0, bulk=2.0) >>> solid = fem.SolidBody(umat=umat, field=field)
A
MultiPointContactdefines the multi-point contact which connects the displacement degrees of freedom of the center-point with the dofs of points located at \(x=1\) if they are in contact. Only the \(x\)-component is considered in this example.>>> import pyvista as pv >>> >>> contact = fem.MultiPointContact( ... field=field, ... points=np.arange(mesh.npoints)[mesh.x == 1], ... centerpoint=-1, ... skip=(False, True, True) ... ) >>> >>> plotter = pv.Plotter() >>> actor_1 = plotter.add_points( ... mesh.points[contact.points], ... point_size=16, ... color="red", ... ) >>> actor_2 = plotter.add_points( ... mesh.points[[contact.centerpoint]], ... point_size=16, ... color="green", ... ) >>> mesh.plot(plotter=contact.plot(plotter=plotter)).show()
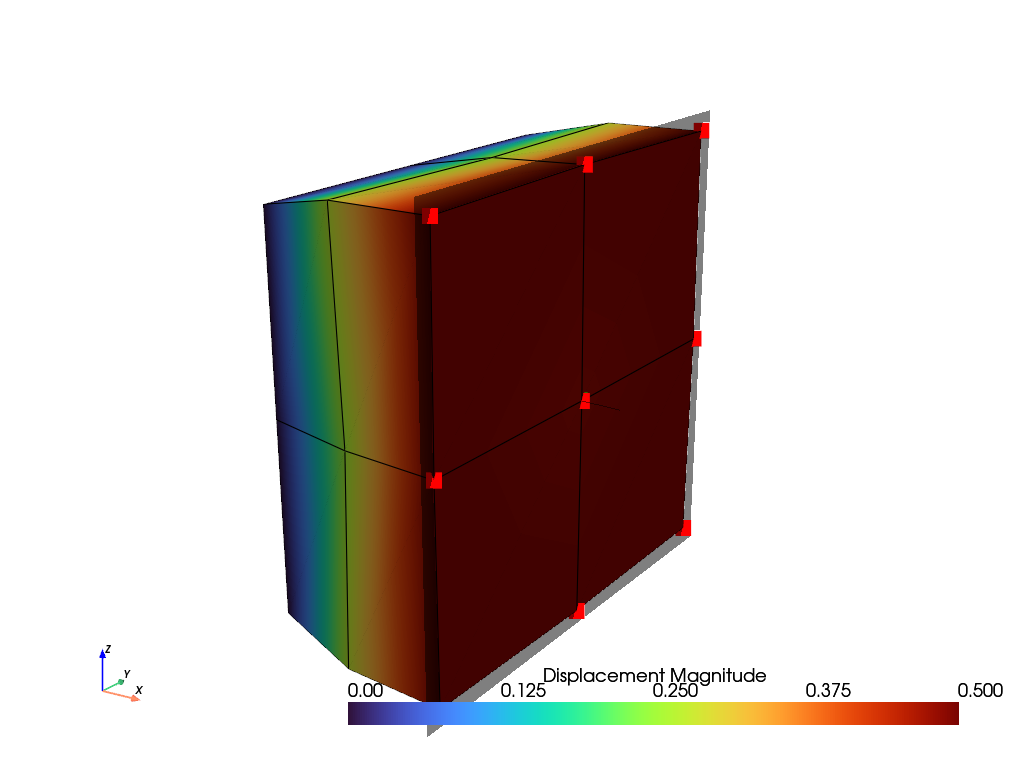
The mesh is fixed on the left end face and a ramped
Boundaryis applied on the center-point of theMultiPointContact. All items are added to aStepand aJobis evaluated.>>> boundaries = { ... "fixed": fem.Boundary(displacement, fx=0), ... "control": fem.Boundary(displacement, fx=2, skip=(1, 0, 0)), ... "move": fem.Boundary(displacement, fx=2, skip=(0, 1, 1)), ... } >>> table = fem.math.linsteps([0, -1, -1.5], num=5) >>> step = fem.Step( ... [solid, contact], ... boundaries=boundaries, ... ramp={boundaries["move"]: table}, ... ) >>> job = fem.Job([step]).evaluate()
A view on the deformed mesh including the
MultiPointContactis plotted.>>> plotter = pv.Plotter() >>> >>> actor_1 = plotter.add_points( ... mesh.points[contact.points] + displacement.values[contact.points], ... point_size=16, ... color="red", ... ) >>> actor_2 = plotter.add_points( ... mesh.points[[contact.centerpoint]] + displacement.values[[contact.centerpoint]], ... point_size=16, ... color="green", ... ) >>> field.plot("Displacement", component=None, plotter=contact.plot(plotter=plotter)).show()
See also
felupe.MultiPointConstraintA Multi-point-constraint which connects a center-point to a list of points.
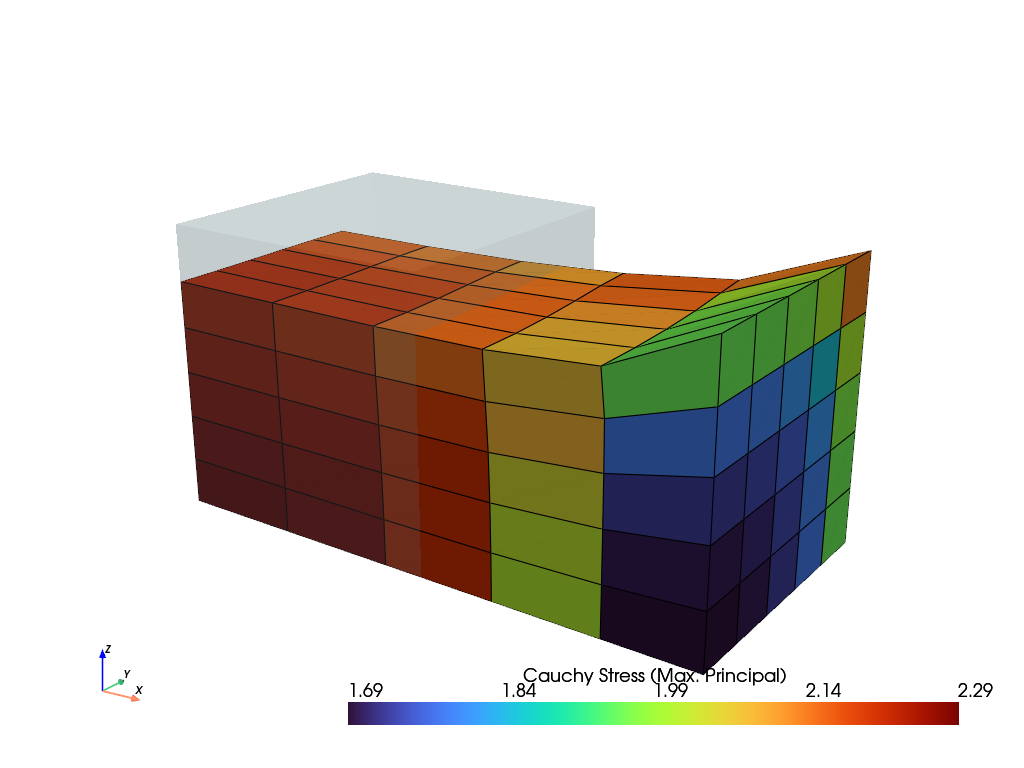
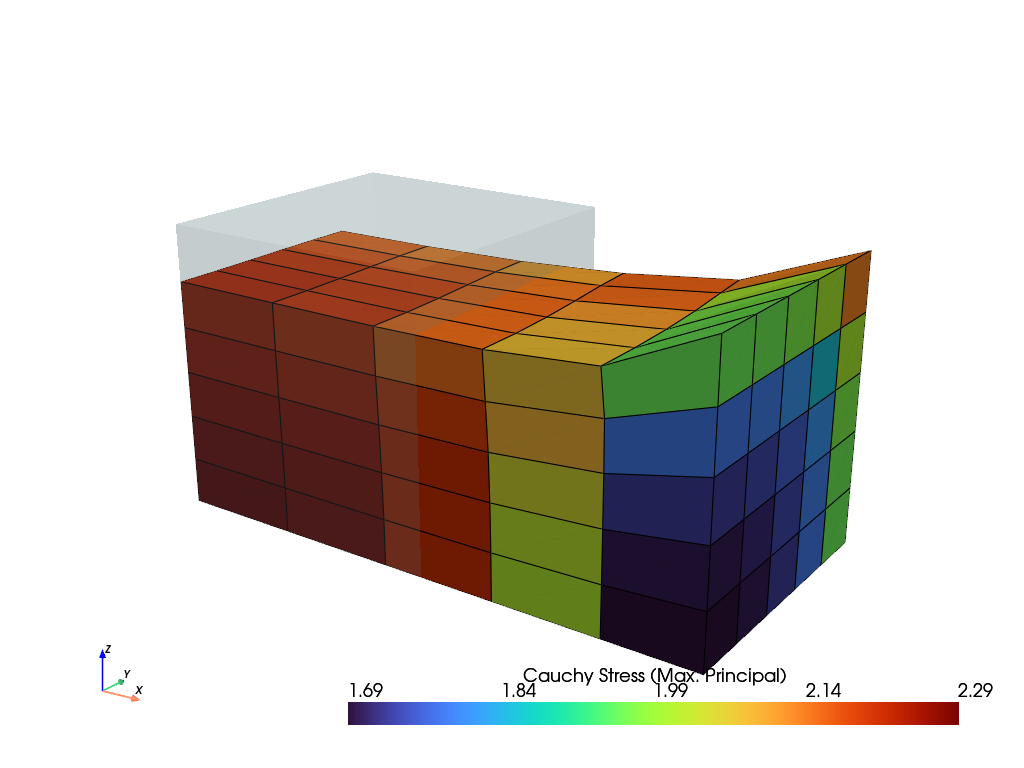
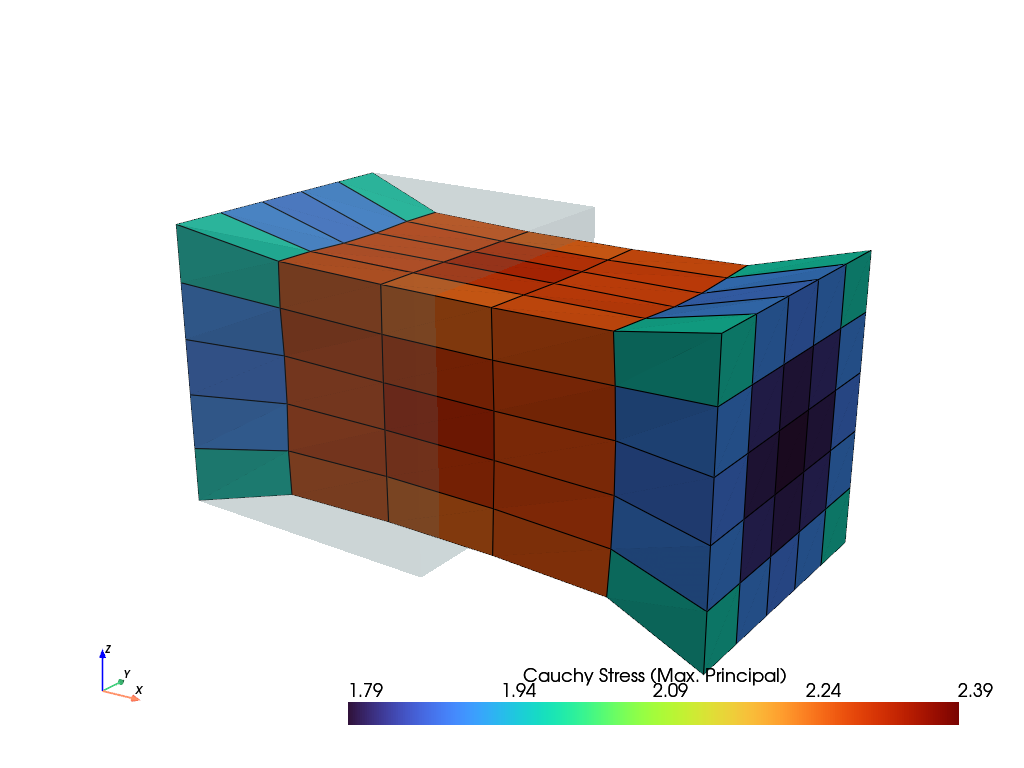
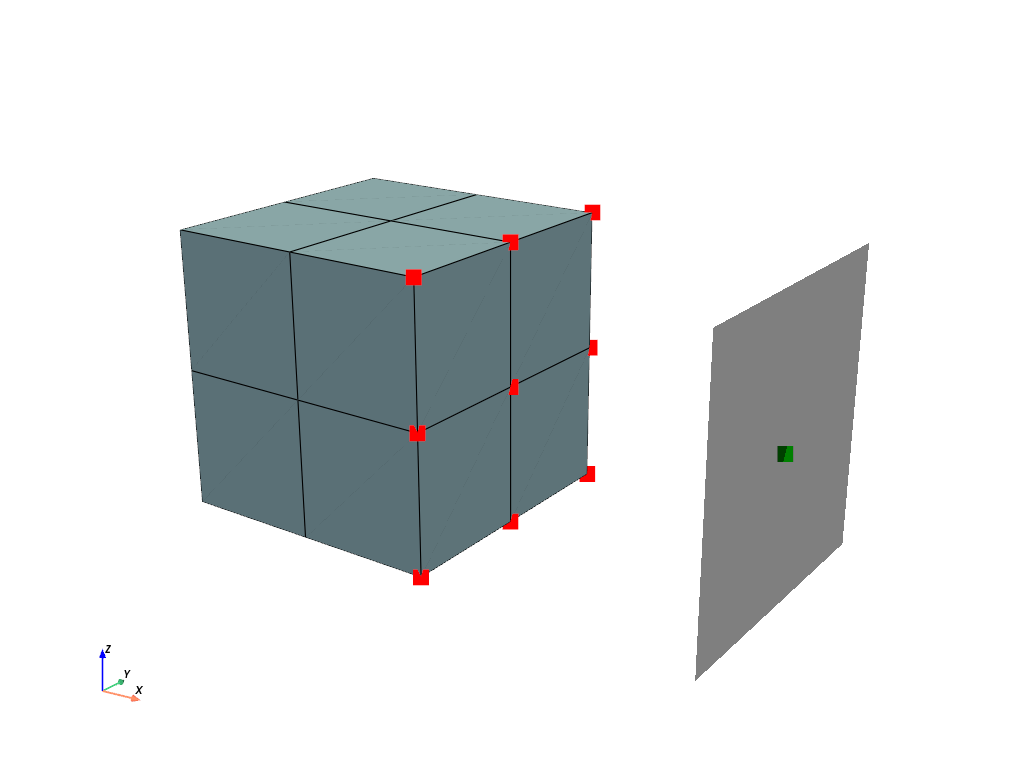
- class felupe.ContactRigidPlane(field, points, centerpoint, normal, friction=0.0, multiplier=1.0, multiplier_tangential=0.1, items=None)[source]#
A node-to-surface contact, where the surface is given by a rigid plane.
- Parameters:
field (FieldContainer) – A field container with the displacement field as first field.
points ((n,) ndarray) – An array with indices of points to be connected to the center-point.
centerpoint (int) – The index of the centerpoint.
normal (ndarray) – The outward plane normal vector.
friction (float, optional) – Coulomb friction coefficient \(\mu\). Default is 0.0.
multiplier (float, optional) – A scale factor for the multiplier to penalize the relative displacements between the center-point and the points in contact. Default is 1.0. The final multiplier is scaled times a base multiplier, based on the mean normal stiffness, if items are given.
multiplier_tangential (float or None, optional) – A scale factor for the multiplier to penalize the relative tangential displacements between the center-point and the points in contact. Default is 0.1. The final multiplier is scaled times a base multiplier, based on the mean tangential stiffness, if items are given.
items (list or None, optional) – A list of items to be considered for the evaluation of the mean stiffness-based multipliers. If None, the multipliers are not based on the mean stiffness. Default is None.
Notes
A
ContactRigidPlaneis supported as an item in aStep.Note
The contact formulation is based on a penalty method. The multiplier should be chosen sufficiently large to enforce the contact constraints, but not too large to cause numerical issues. Best practice is to provide
items, which are connected to the contact points. This will enable mean stiffness-based multipliers.The contact activation is based on the gap between the center-point and the points in potential contact. The gap is evaluated in the deformed configuration in the direction of the plane normal. If the gap is negative, the contact is active, see Eq. (26).
(26)#\[ \begin{align}\begin{aligned}\Delta \boldsymbol{x} &= \boldsymbol{x} - \boldsymbol{x}_c\\g &= \Delta \boldsymbol{x} \cdot \boldsymbol{n}\\g &\lt 0 \quad \text{(contact active)}\end{aligned}\end{align} \]The contact normal force and tangent stiffness matrix are evaluated as a penalty contribution proportional to the gap, see Eq. (27).
(27)#\[ \begin{align}\begin{aligned}\boldsymbol{f} &= \lambda\ g\ \boldsymbol{n}\\\boldsymbol{P}_n &= \boldsymbol{n} \otimes \boldsymbol{n}\\\boldsymbol{K}_n &= \lambda\ \boldsymbol{P}_n\end{aligned}\end{align} \]The tangential contact friction forces are evaluated according to a Coulomb friction law, see Eq. (28) and Eq. (29).
(28)#\[ \begin{align}\begin{aligned}\Delta \boldsymbol{x}_t &= \Delta \boldsymbol{x} - \Delta \boldsymbol{x}^{ref}\\\boldsymbol{P}_t &= \boldsymbol{1} - \boldsymbol{P}_n\\\boldsymbol{f}_t^{trial} &= \lambda \boldsymbol{P}_t\ \Delta \boldsymbol{x}_t\\f_t^{limit} &= \mu |\boldsymbol{f}_n|\end{aligned}\end{align} \](29)#\[\begin{split}\text{state} = \begin{cases} |\boldsymbol{f}_t^{trial}| \leq f_t^{limit} & \text{stick} \\ \text{else} & \text{slip} \end{cases}\end{split}\]In case of sticking contact, the tangential forces are equal to the trial forces, see Eq. (30).
(30)#\[ \begin{align}\begin{aligned}\boldsymbol{f}_t &= \boldsymbol{f}_t^{trial}\\\boldsymbol{K}_t &= \lambda\ \boldsymbol{P}_t\end{aligned}\end{align} \]In case of sliding contact, a scale factor is applied to the tangential forces to enforce the friction limit, see Eq. (31).
(31)#\[ \begin{align}\begin{aligned}s_t &= \frac{f_t^{limit}}{|\boldsymbol{f}_t^{trial}|}\\\boldsymbol{f}_t &= s_t\ \boldsymbol{f}_t^{trial}\\\Delta \boldsymbol{x}^{ref} &= \Delta \boldsymbol{x} - \frac{\boldsymbol{f}_t}{\lambda}\end{aligned}\end{align} \]The tangential stiffness matrix contribution for sliding contact is given in Eq. (32).
(32)#\[ \begin{align}\begin{aligned}\hat{\boldsymbol{f}_t} &= \frac{ \boldsymbol{f}_t^{trial} }{|\boldsymbol{f}_t^{trial}|}\\\hat{\boldsymbol{P}}_t &= \frac{1}{|\boldsymbol{f}_t^{trial}|} \left( \boldsymbol{1} - \hat{\boldsymbol{f}}_t \otimes \hat{\boldsymbol{f}}_t \right)\\\boldsymbol{K}_t &= \mu\ \lambda\ |\boldsymbol{f}_n|\ \hat{\boldsymbol{P}}_t\ \boldsymbol{P}_t\end{aligned}\end{align} \]Examples
This example shows how to use a
ContactRigidPlane. An additional center-point is added to a mesh.>>> import numpy as np >>> import felupe as fem >>> >>> mesh = fem.Cube(n=3) >>> mesh.add_points([2.0, 0.5, 0.5]) >>> >>> region = fem.RegionHexahedron(mesh) >>> displacement = fem.Field(region, dim=3) >>> field = fem.FieldContainer([displacement]) >>> >>> umat = fem.NeoHooke(mu=1.0, bulk=2.0) >>> solid = fem.SolidBody(umat=umat, field=field)
A
ContactRigidPlanedefines the contact, which connects the displacement degrees of freedom of the center-point with the dofs of points located at \(x=1\) if they are in contact. Only the \(x\)-component is considered in this example.>>> import pyvista as pv >>> >>> contact = fem.ContactRigidPlane( ... field=field, ... points=np.arange(mesh.npoints)[mesh.x == 1], ... centerpoint=-1, ... normal=[-1.0, 0, 0], ... friction=0.5, ... multiplier=1e2, ... ) >>> >>> plotter = pv.Plotter() >>> actor_1 = plotter.add_points( ... mesh.points[contact.points], ... point_size=16, ... color="red", ... ) >>> actor_2 = plotter.add_points( ... mesh.points[[contact.centerpoint]], ... point_size=16, ... color="green", ... ) >>> mesh.plot(plotter=contact.plot(size=1.2, plotter=plotter)).show()
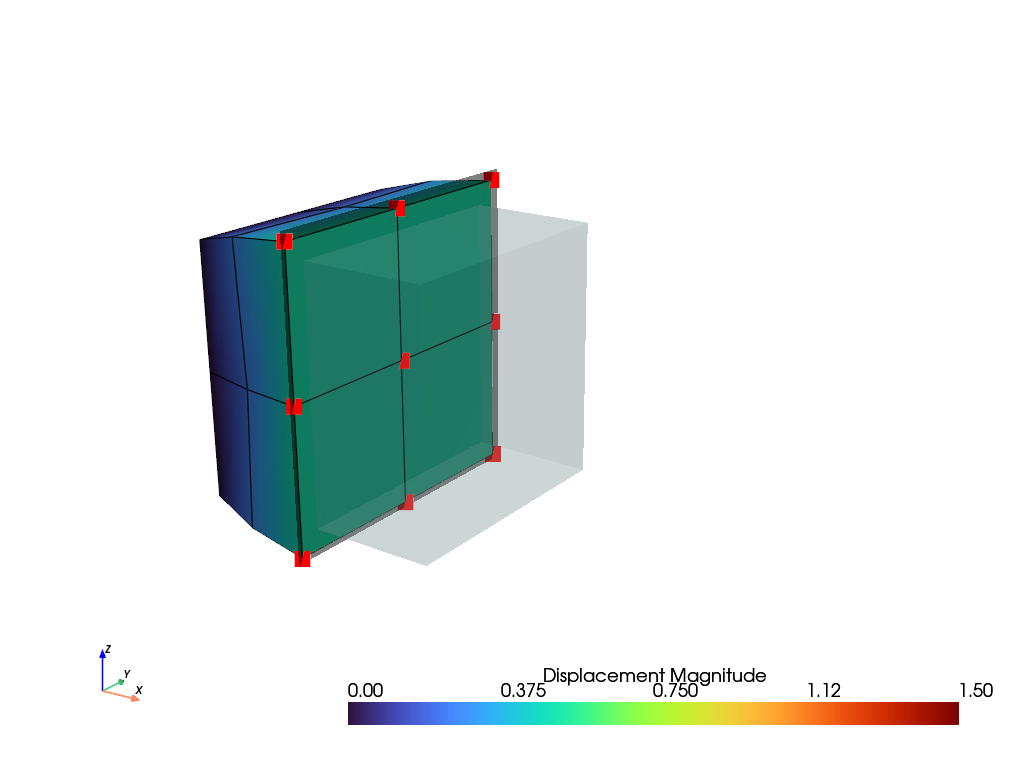
The mesh is fixed on the left end face and a ramped
Boundaryis applied on the center-point of theContactRigidPlane. All items are added to aStepand aJobis evaluated.>>> boundaries = { ... "fixed": fem.Boundary(displacement, fx=0), ... "control": fem.Boundary(displacement, fx=2, skip=(1, 0, 0)), ... "move": fem.Boundary(displacement, fx=2, skip=(0, 1, 1)), ... } >>> table = fem.math.linsteps([0, -1, -1.5], num=5) >>> step = fem.Step( ... [solid, contact], ... boundaries=boundaries, ... ramp={boundaries["move"]: table}, ... ) >>> job = fem.Job([step]).evaluate()
A view on the deformed mesh including the
ContactRigidPlaneis plotted.>>> plotter = pv.Plotter() >>> >>> actor_1 = plotter.add_points( ... mesh.points[contact.points] + displacement.values[contact.points], ... point_size=16, ... color="red", ... ) >>> actor_2 = plotter.add_points( ... mesh.points[[contact.centerpoint]] + displacement.values[[contact.centerpoint]], ... point_size=16, ... color="green", ... ) >>> field.plot( ... "Displacement", ... component=None, ... show_undeformed=False, ... plotter=contact.plot(size=1.2, plotter=plotter), ... clim=[0, 0.5], ... ).show()
- plot(plotter=None, offset=0.0, show_edges=True, color='black', opacity=0.5, deformed=True, size=None, line_width=None, line_width_normal=None, show_point=True, show_line=True, sym=(False, False, False), **kwargs)#
- class felupe.mechanics.StateNearlyIncompressible(field)[source]#
A State with internal cell-wise constant dual fields for (nearly) incompressible solid bodies.
Notes
The internal fields \(p\) and \(\bar{J}\) are treated as internal fields, directly derived from the displacement field. Hence, these fields are not exported to the global degrees of freedom.
- Parameters:
field (FieldContainer) – A field container with the displacement field.
See also
felupe.SolidBodyNearlyIncompressibleA (nearly) incompressible solid body with methods for the assembly of sparse vectors/matrices.
- integrate_shape_function_gradient(parallel=False, out=None)[source]#
Integrated sub-block matrix containing the shape-functions gradient w.r.t. the deformed coordinates \(\boldsymbol{K}_{\boldsymbol{u}p}\).
\[\int_V \delta \boldsymbol{F} : \frac{\partial J}{\partial \boldsymbol{F}} ~ dV\ \Delta p \longrightarrow \boldsymbol{K}_{\boldsymbol{u}p}\]
- class felupe.mechanics.Assemble(vector=None, matrix=None, mass=None, multiplier=None)[source]#
A class with methods for assembling vectors and matrices of an Item.
- class felupe.mechanics.Evaluate(gradient, hessian, stress=None, cauchy_stress=None, kirchhoff_stress=None)[source]#
A class with evaluate methods of an Item.
- class felupe.mechanics.Results(stress=False, elasticity=False)[source]#
A class with intermediate results of an Item.